Двунаправленный двигатель тепловой жидкости переменного объема
Simscape/Жидкости/Тепловая жидкость/Насосы и двигатели

Блок Variable-Displacement Motor представляет устройство, которое извлекает степень из тепловой гидравлической сети и доставляет ее в механическую вращательную сеть. Значение перемещения мотора изменяется во время симуляции в соответствии с входом физического сигнала, заданной в порте D.
Порты A и B представляют входные отверстия мотора. Порты R и C представляют приводной вал и случай. Во время нормальной операции перепад давления между портом A и портом B вызывает положительную скорость потока жидкости от порта A к порту B и положительное вращение вала мотора относительно корпуса мотора. Этот режим работы здесь называется прямым движением.
Операции
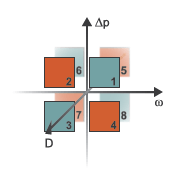
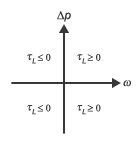
Блок имеет восемь режимов работы. Рабочий режим зависит от перепада давления от порта A до порта B, Δp = p B - p A; скорость вращения, ω = ω R - ω C; и объемное перемещение жидкости в порту D. Рисунок выше отображает эти режимы на октанты диаграммы Δp - ω - D:
Режим 1, Прямое движение: Поток от порта A к порту B вызывает уменьшение давления с A до B и положительную угловую скорость вала.
Режим 2, Реверсивный насос: Отрицательная угловая скорость вала вызывает увеличение давления от порта B до порта A и поток от B до порта A.
Режим 3, Реверсивный мотор: Поток от порта B к порту A вызывает снижение давления от B до A и отрицательную угловую скорость вала.
Режим 4, Прямой насос: Положительная угловая скорость вала вызывает увеличение давления от порта A до порта B и поток от A до B.
Режим 5, Реверсивный насос: Положительная угловая скорость вала вызывает увеличение давления от порта B до порта A и поток от B до A.
Режим 6, Прямое движение: Поток от порта A к порту B вызывает уменьшение давления с A до B и положительную угловую скорость вала.
Режим 7, Прямой насос: Отрицательная угловая скорость вала вызывает увеличение давления от порта A до порта B и поток от A до B.
Режим 8, Реверсивный мотор: Поток от B до A вызывает уменьшение давления с B до A и положительную угловую скорость вала.
Время отклика двигателя рассматривается незначительным по сравнению со временем отклика системы. Принято, что двигатель достигает устойчивого состояния почти мгновенно и обрабатывается как квазистационарный компонент.
Модель электродвигателя учитывает потери степени из-за утечек и трения. Утечки являются внутренними и происходят только между отверстиями входа и выхода мотора. Блок вычисляет уровень утечек и крутящий момент трения с помощью вашего выбора пяти вариантов параметризации потерь. Вы выбираете для использования в блоке варианты параметризации и, в Analytical or tabulated data case, параметр Friction and leakage parameterization.
Параметризации потерь
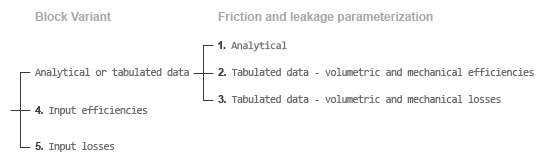
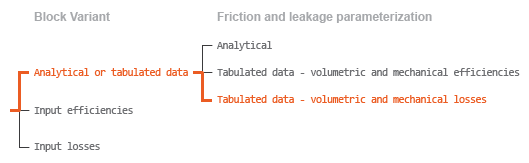
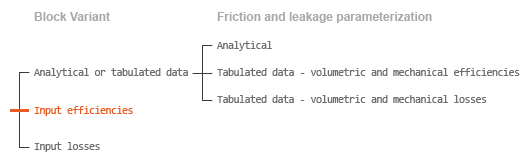
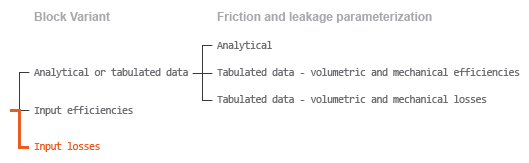
Блок обеспечивает три Simulink® варианты для выбора. Чтобы изменить вариант активного блока, щелкните правой кнопкой мыши блок и выберите Simscape > Block choices. Доступными вариантами являются:
Analytical or tabulated data - Получение механического и объемного КПД или потерь из аналитических моделей на основе номинальных параметров или табличных данных. Используйте параметр Friction and leakage parameterization, чтобы выбрать точный тип входа.
Input efficiencies - Обеспечьте механический и объемный КПД непосредственно через входные порты физического сигнала.
Input losses - Обеспечьте механические и объемные потери непосредственно через входные порты физического сигнала. Механические потери определяются как крутящий момент внутреннего трения. Объемные потери определяются как уровень внутренних утечек.
Массовый расход жидкости, генерируемый двигателем,
где:
- фактический массовый расход жидкости.
- идеальный массовый расход жидкости.
- внутренние утечки mas скорости потока жидкости.
Крутящий момент на моторе,
где:
τ - фактический крутящий момент.
τ Идеал является идеальным крутящим моментом.
τ Трение - это крутящий момент трения.
Идеальный массовый расход жидкости
и идеальный крутящий момент мотора
где:
ρ - среднее значение плотности жидкости при тепловых гидравлических портах A и B.
D Sat является сглаженным перемещением, вычисленным так, чтобы удалить числовые разрывы между отрицательным и положительным перемещениями.
ω - угловая скорость вала.
Δp - перепад давления между входным и выходным отверстиями.
Перемещение насыщения определяется как:
где:
D - перемещение, заданное в порте D физического сигнала.
D порог является заданным значением параметра Displacement threshold for motor-pump transition блока.
Вычисления уровня внутренних утечек и трения зависят от выбранного варианта блока. Если вариант блока Analytical or tabulated dataвычисления зависят также от настройки Leakage and friction parameterization параметра. Существуют пять возможных сочетаний вариантов блока и настроек параметризации.
Случай 1: Вычисление аналитической эффективности
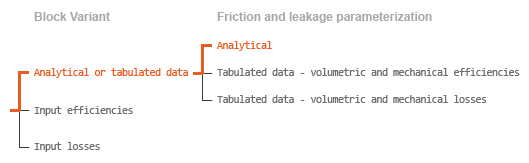
Если активный вариант блока Analytical or tabulated data и параметру Leakage and friction parameterization задано значение Analytical, уровень утечек является
и крутящий момент трения
где:
K HP является коэффициентом Хагена-Пуазейля для ламинарных течений в трубе. Этот коэффициент вычисляется из заданных номинальных параметров.
μ - динамическая вязкость тепловой жидкости, принятая здесь как среднее значение ее значений в тепловых гидравлических портах.
k - крутящий момент трения от коэффициента перепада давления при номинальном перемещении, который определяется из Mechanical efficiency at nominal conditions, ηm,nom:
τfr,nom - крутящий момент трения в номинальных условиях:
D Nom является заданным значением параметра Nominal Displacement блока.
τ 0 является заданным значением No-load torque параметров блоков.
ω Nom является заданным значением параметра Nominal shaft angular velocity блока.
Δp Nom является заданным значением параметра Nominal pressure drop блока. Это перепад давления, при котором задается номинальный объемный КПД.
Коэффициент Хагена-Пуазейля определяется из номинальных параметров жидкости и компонента уравнением
где:
ω Nom является заданным значением параметра Nominal shaft angular velocity. Это - скорость вращения, при которой задается номинальный объемный КПД.
μ Nom является заданным значением параметра Nominal Dynamic viscosity блока. Это динамическая вязкость, при которой задан номинальный объемный КПД.
η v, Nom является заданным значением параметра Volumetric efficiency at nominal conditions блока. Это объемный КПД, соответствующий заданным номинальным условиям.
Случай 2: Табличный данный КПД
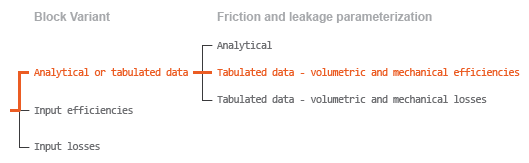
Если активный вариант блока Analytical or tabulated data и параметру Leakage and friction parameterization задано значение Tabulated data — volumetric and mechanical efficiencies, уровень утечек является
и крутящий момент трения
где:
α является численным параметром сглаживания для перехода режима мотор-насос.
- расход утечек в моторном режиме.
- уровень утечек в режиме насоса.
τ значении трения Motor является крутящим моментом трения в режиме motor.
τ Triction, Pump является крутящим моментом трения в режиме насоса.
α параметра сглаживания задается гиперболической функцией
где:
Δp порог является заданным значением параметра Pressure drop threshold for motor-pump transition блока.
ω порог является заданным значением параметра Angular velocity threshold for motor-pump transition блока.
D порог является заданным значением параметра Angular velocity threshold for motor-pump transition блока.
Расход утечек вычисляется из объемного КПД, величины, которая задается в сведенной в табличной форме в области Δp - ɷ - D через параметр Volumetric efficiency table блока. При работе в моторном режиме (квадрантах 1 и 3 графика Δp - ɷ - D, показанной на карте Режимов работы) расход утечек:
где η v - объемный КПД, полученный либо путем интерполяции, либо экстраполяции табличных данных. Точно так же при работе в режиме насоса (квадранты 2 и 4 графика Δp - ɷ - D) расход утечек:
Крутящий момент трения аналогично вычисляется из механической эффективности, величины, которая задается в сведенной в табличной форме в области Δp - ɷ - D через параметр Mechanical efficiency table блока. Работая в моторном способе (сектора 1 и 3 Δp - ɷ - D график):
где η m - механическая эффективность, получаемый либо интерполяцией, либо экстраполяцией табличных данных. Точно так же при работе в режиме насоса (квадранты 2 и 4 Δp - ɷ - D графика):
Случай 3: Табличные данные потерь
Если активный вариант блока Analytical or tabulated data и параметру Leakage and friction parameterization задано значение Tabulated data — volumetric and mechanical losses, расход утечек (объемный) задается непосредственно в сведённой в табличной форме в области Δp - ɷ - D:
Массовый расход жидкости из-за утечек вычисляется из объемной скорости потока жидкости:
Крутящий момент трения точно так же задан в сведенной в табличной форме:
где q Leak (Δp, ω) и τ Triction (Δp, ω) - объемные и механические потери, полученные путем интерполяции или экстраполяции табличных данных, заданных параметрами Volumetric loss table и Mechanical loss table блоков.
Случай 4: Входы физического сигнала эффективности
Если активный вариант блока Input efficienciesвычисления уровня утечек и трения выполняются так, как описано для табличного данного КПД (случай 2). Объемные и механические интерполяционные таблицы эффективности заменяются входами физического сигнала, которые вы задаете через порты EV и EM.
Эффективности определяются как положительные величины со значением от нуля до единицы. Входные значения за пределами этих границ устанавливаются равными ближайшей границе (ноль для входов меньше нуля, один для входов больше единицы). Другими словами, сигналы эффективности насыщаются в нуле и единице.
Случай 5: Входы физического сигнала потери
Если вариант блока Input lossesвычисления уровня утечек и крутящего момента трения аналогичны описанным для табличных данных потерь (случай 3). Объемные и механические интерполяционные таблицы заменены входами физического сигнала, которые вы задаете через порты LV и LM.
Знаки входов игнорируются. Блок автоматически устанавливает знаки из условий работы, установленных во время симуляции - точнее, из Δp - ɷ квадранта, в котором компонент работает. Другими словами, является ли вход положительным или отрицательным нерелевантным блоку.
Механическая работа, выполняемая двигателем, связана с энергетическим обменом. Управляющее уравнение энергетического баланса:
где:
Φ A и Φ B являются скоростями потока энергии в портах A и B, соответственно.
P mech является механической степенью, произведенной из-за крутящего момента, τ и скорости вращения двигателя, ω :
Гидравлическая степень мотора является функцией различия давления между портами мотора:
Сжимаемость жидкости незначительна.
Нагрузки на валу мотора от инерции, трения и упругих сил незначительны.
Открытые параметры блоков зависят от варианта активного блока. Смотрите Варианты блока и параметры потерь.
Вариант 1:Analytical or tabulated dataLeakage and friction parameterization - Параметризация для вычисления расхода утечек и крутящего момента тренияAnalytical (по умолчанию) | Tabulated data — volumetric and mechanical efficiencies | Tabulated data — volumetric and mechanical lossesПараметризация используется для вычисления скорости потока жидкости и потерь крутящего момента из-за внутренних утечек и трения. The Analytical параметризация основана на номинальных параметрах, обычно доступных из таблиц данных компонентов. Остальные, табличные, опции полагаются на интерполяционные таблицы, чтобы сопоставить перепад давления, скорость вращения и перемещение с кПД или потерями компонента ..
Nominal displacement - Перемещение, при котором можно задать объемный КПД30 cm^3/rev (по умолчанию) | скаляр с модулями измерения объем/уголПеремещение жидкости, при котором известен объемный КПД компонента. Номинальные параметры обычно публикуются для стандартных условий работы в таблицах данных производителя. Блок использует этот параметр, чтобы вычислить, с помощью простых линейных функций, уровень утечек и крутящий момент трения.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Analytical.
Nominal shaft angular velocity - Угловая скорость вала, при которой можно задать объемный КПД188 rad/s (по умолчанию) | скаляр с модулями измерения угол/времяУгловая скорость вращения вала, при которой известен объемный КПД компонента. Номинальные параметры обычно публикуются для стандартных условий работы в таблицах данных производителя. Блок использует этот параметр, чтобы вычислить, с помощью простых линейных функций, уровень утечек и крутящий момент трения.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Analytical.
Nominal pressure drop - Перепад давления, при котором определяется объемный КПД10 MPa (по умолчанию) | скаляр с модулями измерения давленияПерепад давления между входным и выходным отверстиями, при котором известен объемный КПД компонента. Номинальные параметры обычно публикуются для стандартных условий работы в таблицах данных производителя. Блок использует этот параметр, чтобы вычислить, с помощью простой линейной функции, уровня внутренних утечек.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Analytical.
Nominal dynamic viscosity - Динамическая вязкость, при которой можно задать объемный КПД0.9 cP (по умолчанию) | скаляр с модулями измерения площади/времениДинамическая вязкость гидравлической жидкости, при которой известен объемный КПД компонента. Номинальные параметры обычно публикуются для стандартных условий работы в таблицах данных производителя. Блок использует этот параметр, чтобы вычислить, с помощью простой линейной функции, уровня внутренних утечек.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Analytical.
Volumetric efficiency at nominal conditions - Объемный КПД при заданных номинальных условиях0.92 (по умолчанию) | безразмерным скаляром между 0 и 1Объемный КПД, заданный как отношение фактических объемных скоростей потока жидкости к идеальному, при заданных номинальных условиях. Номинальные параметры обычно публикуются для стандартных условий работы в таблицах данных производителя. Блок использует этот параметр, чтобы вычислить, с помощью простой линейной функции, уровня внутренних утечек.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Analytical.
No-load torque - Минимальный крутящий момент, требуемый для начала вращения вала0 N*m (по умолчанию) | скаляр с модулями измерения крутящего моментаКрутящий момент, требуемый для преодоления трения и начала вращения механического вала. Этот крутящий момент является независимой от нагрузки компонента общего крутящего момента трения.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Analytical.
Mechanical efficiency at nominal conditions - Отношение фактической механической степени к идеальной0.88 (по умолчанию) | положительная скалярная величинаОтношение фактической механической степени к идеальной механической степени в номинальных условиях.
Чтобы включить этот параметр, установите Leakage and friction parameterization равным Analytical.
Displacement threshold for motor-pump transition - Перемещение жидкости, при котором инициируется плавный переход между режимами насоса и мотора0.5 cm^3/rev (по умолчанию) | положительная скалярная величина с модулями измерения объем/площадьПеремещение жидкости ниже которого компонент начинает переход между режимами мотора и насоса. Гиперболическое Tanh функция преобразует уровень утечек и крутящий момент трения таким образом, чтобы переход был непрерывным и плавным.
Cross-sectional area at ports A and B - Площадь сечения входного и выходного отверстий компонента0.01 m^2 (по умолчанию) | положительная скалярная величина с модулями измерения площадиПлощадь сечения входного и выходного отверстий компонента. Площади приняты равными. Этот параметр должен быть больше нуля.
Pressure drop vector for efficiencies, dp - Перепады давления, при которых определяется объемный и механический КПДM элемент перепада давления, при котором можно задать табличные данные эффективности. Размер вектора, M, должен быть два или больше. Векторные элементы не должны быть равномерно разнесены. Однако они должны монотонно увеличиваться в значении слева направо.
Табличные данные не должны включать все октанты операции - данные (ɷ, Δp, D) графики. Достаточно задать данные для одного октанта. См. описание блока для рабочих режимов, соответствующих различным октантам.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Tabulated data — volumetric and mechanical efficiencies.
Shaft angular velocity vector for efficiencies, w - Скорости вращения, при которых можно задать объемный и механический КПДN элемент угловых скоростей вала, при которых можно задать табличные данные эффективности. Размер вектора, N, должен быть два или больше. Векторные элементы не должны быть равномерно разнесены. Однако они должны монотонно увеличиваться в значении слева направо.
Табличные данные не должны включать все октанты операции - данные (ɷ, Δp, D) графики. Достаточно задать данные для одного октанта. См. описание блока для рабочих режимов, соответствующих различным октантам.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Tabulated data — volumetric and mechanical efficiencies.
Displacement vector for efficiencies, D - Смещения, при которых можно задать объемный и механический КПДL элемент перемещений, при котором можно задать табличные данные эффективности. Размер вектора, N, должен быть два или больше. Векторные элементы не должны быть равномерно разнесены. Однако они должны быть монотонно увеличиваться или уменьшаться.
Табличные данные не должны включать все октанты операции - данные (ɷ, Δp, D) графики. Достаточно задать данные для одного октанта. См. описание блока для рабочих режимов, соответствующих различным октантам.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Tabulated data — volumetric and mechanical efficiencies.
Volumetric efficiency table, e_v(dp,w,D) - Объемный КПД при заданных перепадах давления, скоростях вращения и перемещенияхM -by N -by - L матрица с объемным КПД при заданных перепадах давления жидкости, угловых скоростях вала и перемещениях. Эффективность должна быть в области значений 0– 1. M, N и L являются размерами заданных векторов интерполяционной таблицы:
M - количество векторных элементов в параметре Pressure drop vector for efficiencies, dp.
N - количество векторных элементов в параметре Shaft angular velocity vector for efficiencies, w.
L - количество векторных элементов в параметре Displacement vector for efficiencies, D.
Табличные данные не должны включать все октанты операции - данные (ɷ, Δp, D) графики. Достаточно задать данные для одного октанта. См. описание блока для рабочих режимов, соответствующих различным октантам.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Tabulated data — volumetric and mechanical efficiencies.
Mechanical efficiency table, e_m(dp,w,D) - Механический КПД при заданных перепадах давления, скоростях вращения и перемещенияхM -by N -by - L матрица с механическим КПД, соответствующими заданным перепадам давления жидкости, угловым скоростям вала и перемещениям. Эффективность должна быть в области значений 0– 1. M, N и L являются размерами заданных векторов интерполяционной таблицы:
M - количество векторных элементов в параметре Pressure drop vector for efficiencies, dp.
N - количество векторных элементов в параметре Shaft angular velocity vector for efficiencies, w.
L - количество векторных элементов в параметре Displacement vector for efficiencies, D.
Табличные данные не должны включать все октанты операции - данные (ɷ, Δp, D) графики. Достаточно задать данные для одного октанта. См. описание блока для рабочих режимов, соответствующих различным октантам.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Tabulated data — volumetric and mechanical efficiencies.
Pressure drop threshold for motor-pump transition - Перепад давления, при котором инициируется плавный переход между режимами двигателя и насоса1e-3 MPa (по умолчанию) | скаляр с модулями измерения давленияПерепад давления между входным и выходным отверстиями, ниже которого компонент начинает переход между режимами мотора и насоса. Гиперболическое Tanh функция преобразует уровень утечек и крутящий момент трения таким образом, чтобы переход был непрерывным и плавным.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Tabulated data — volumetric and mechanical efficiencies.
Angular velocity threshold for motor-pump transition - Угловая скорость вала, при которой инициируется плавный переход между режимами насоса и мотора10 rad/s (по умолчанию) | скаляр с модулями измерения угол/времяУгловая скорость вала, ниже которой начинает переход между режимами мотора и насоса компонент. Гиперболическое Tanh функция преобразует уровень утечек и крутящий момент трения таким образом, чтобы переход был непрерывным и плавным.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Tabulated data — volumetric and mechanical efficiencies.
Displacement threshold for motor-pump transition - Перемещение жидкости, при котором инициируется плавный переход между режимами насоса и мотора0.5 cm^3/rev (по умолчанию) | положительная скалярная величина с модулями измерения объем/площадьПеремещение жидкости ниже которого компонент начинает переход между режимами мотора и насоса. Гиперболическое Tanh функция преобразует уровень утечек и крутящий момент трения таким образом, чтобы переход был непрерывным и плавным.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Tabulated data — volumetric and mechanical efficiencies.
Check if operating beyond the octants of supplied tabulated data - Режим предупреждения моделирования условий работы вне области значений табличных данныхNone (по умолчанию) | WarningРежим предупреждения моделирования условий работы вне области значений табличных данных. Выберите Warning должно быть уведомлено, когда перепад давления жидкости, угловая скорость вала или мгновенное перемещение пересекают вне заданных табличных данных. Предупреждение не приводит к остановке симуляции.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Tabulated data — volumetric and mechanical efficiencies или Tabulated data — volumetric and mechanical losses.
Pressure drop vector for losses, dp - Перепады давления для определения объемных и механических потерьM элемент перепада давления, при котором можно задать табличные данные потерь. Размер вектора, M, должен быть два или больше. Векторные элементы не должны быть равномерно разнесены. Однако они должны монотонно увеличиваться в значении слева направо.
Табличные данные не должны включать все октанты операции - данные (ɷ, Δp, D) графики. Достаточно задать данные для одного октанта. См. описание блока для рабочих режимов, соответствующих различным октантам.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Tabulated data — volumetric and mechanical losses.
Shaft angular velocity vector for losses, w - Скорости вращения, при которых можно задать объемные и механические потериN элемент угловых скоростей вала, при которых можно задать табличные данные потерь. Размер вектора, N, должен быть два или больше. Векторные элементы не должны быть равномерно разнесены. Однако они должны монотонно увеличиваться в значении слева направо.
Табличные данные не должны включать все октанты операции - данные (ɷ, Δp, D) графики. Достаточно задать данные для одного октанта. См. описание блока для рабочих режимов, соответствующих различным октантам.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Tabulated data — volumetric and mechanical losses.
Displacement vector for losses, D - Перемещение, при котором можно определить объемные и механические потериL элемент перемещений, при котором можно задать табличные данные потерь. Размер вектора, N, должен быть два или больше. Векторные элементы не должны быть равномерно разнесены. Однако они должны быть монотонно увеличиваться или уменьшаться.
Табличные данные не должны включать все октанты операции - данные (ɷ, Δp, D) графики. Достаточно задать данные для одного октанта. См. описание блока для рабочих режимов, соответствующих различным октантам.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Tabulated data — volumetric and mechanical losses.
Volumetric loss table, q_loss(dp,w,D) - Расход внутренних утечек при заданных перепадах давления, скоростях вращения и перемещенияхM -by N -by - L матрица с объемными потерями при заданных перепадах давления жидкости, угловых скоростях вала и перемещениях. Объемные потери здесь заданы как расход внутренних объемных утечек между портом А и портом B. M, N и L являются размерами заданных векторов интерполяционной таблицы:
M - количество векторных элементов в параметре Pressure drop vector for losses, dp.
N - количество векторных элементов в параметре Shaft angular velocity vector for losses, w.
L - количество векторных элементов в параметре Displacement vector for losses, D.
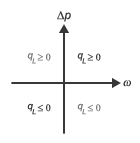
Табличные данные не должны включать все октанты операции - данные (ɷ, Δp, D) графики. Достаточно задать данные для одного октанта. См. описание блока для рабочих режимов, соответствующих различным октантам. Табличные данные объемных потерь должны соответствовать положительным значениям, показанным в рисунок, при положительных перепадах давления и отрицательных значениях при отрицательных перепадах давления.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Tabulated data — volumetric and mechanical losses.
Mechanical loss table, torque_loss(dp,w,D) - Крутящие моменты трения при заданных перепадах давления, скоростях вращения и перемещенияхM -by N -by - L матрица с механическими потерями при заданных перепадах давления жидкости, угловых скоростях вала и перемещениях. Здесь механические потери определяются как крутящий момент трения из-за уплотнений и внутренних компонентов. M, N и L являются размерами заданных векторов интерполяционной таблицы:
M - количество векторных элементов в параметре Pressure drop vector for losses, dp.
N - количество векторных элементов в параметре Shaft angular velocity vector for losses, w.
L - количество векторных элементов в параметре Displacement vector for losses, D.
Табличные данные не должны включать все октанты операции - данные (ɷ, Δp, D) графики. Достаточно задать данные для одного октанта. См. описание блока для рабочих режимов, соответствующих различным октантам. Табличные данные для механических потерь должны соответствовать соглашению, показанному на рисунке, с положительными значениями при положительных скоростях вращения и отрицательными значениями при отрицательных скоростях вращения.
Этот параметр активируется, когда параметр Leakage and friction parameterization установлен в Tabulated data — volumetric and mechanical losses.
Input efficienciesMinimum volumetric efficiency - Нижняя граница насыщения входного сигнала объемного КПД1e-3 (по умолчанию) | безразмерным скаляром между 0 и 1Наименьшее допустимое значение объемного КПД. Вход от порта EV физического сигнала достигает заданного значения. Если входной сигнал падает ниже минимального объемного КПД, объемный КПД устанавливается на это значение.
Этот параметр активируется, когда для варианта блока задано значение Input efficiencies.
Maximum volumetric efficiency - Верхняя граница насыщения входного сигнала объемного КПД1 (по умолчанию) | безразмерным скаляром между 0 и 1Наибольшее допустимое значение объемного КПД. Вход от порта EV физического сигнала достигает заданного значения. Если входной сигнал повышается максимальный объемный КПД, объемный КПД устанавливается на это значение.
Этот параметр активируется, когда для варианта блока задано значение Input efficiencies.
Minimum mechanical efficiency - Нижняя граница насыщения входного сигнала объемного КПД1e-3 (по умолчанию) | безразмерным скаляром между 0 и 1Наименьшее допустимое значение механической эффективности. Вход от порта EM физического сигнала достигает заданного значения. Если входной сигнал падает ниже минимальной механической эффективности, механическая эффективность устанавливается на эту минимальную механическую эффективность.
Этот параметр активируется, когда для варианта блока задано значение Input efficiencies.
Maximum mechanical efficiency - Верхняя граница насыщения входного сигнала объемного КПД1 (по умолчанию) | безразмерным скаляром между 0 и 1Наибольшее допустимое значение механической эффективности. Вход от порта EM физического сигнала достигает этого значения. Если входной сигнал повышается выше максимальной механической эффективности, механическая эффективность устанавливается на максимальную механическую эффективность.
Этот параметр активируется, когда для варианта блока задано значение Input efficiencies.
Pressure drop threshold for motor-pump transition - Перепад давления, при котором инициируется плавный переход между режимами двигателя и насоса1e-3 MPa (по умолчанию) | скаляр с модулями измерения давленияПерепад давления между входным и выходным отверстиями, ниже которого компонент начинает переход между режимами мотора и насоса. Гиперболическое Tanh функция преобразует уровень утечек и крутящий момент трения таким образом, чтобы переход был непрерывным и плавным.
Этот параметр активируется, когда для варианта блока задано значение Input efficiencies.
Angular velocity threshold for motor-pump transition - Скорость вращения, с которой можно инициировать плавный переход между режимами насоса и двигателя10 rad/s (по умолчанию) | скаляр с модулями измерения угол/времяУгловая скорость вала, ниже которой начинает переход между режимами мотора и насоса компонент. Гиперболическое Tanh функция преобразует уровень утечек и крутящий момент трения таким образом, чтобы переход был непрерывным и плавным.
Этот параметр активируется, когда для варианта блока задано значение Input efficiencies.
Displacement threshold for motor-pump transition - Перемещение, при котором инициируется плавный переход между режимами насоса и мотора0.5 cm^3/rev (по умолчанию) | скаляр с модулями измерения объем/уголАбсолютное значение мгновенного хода, ниже которого компонент переходит между режимами двигателя и накачки. Гиперболическое Tanh функция преобразует уровень утечек и крутящий момент трения таким образом, чтобы переход был непрерывным и плавным.
Cross-sectional area at ports A and B - Площадь сечения входного и выходного отверстий компонента0.01 m^2 (по умолчанию) | положительная скалярная величина с модулями измерения площадиПлощадь сечения входного и выходного отверстий компонента. Площади приняты равными. Этот параметр должен быть больше нуля.
Input lossesPressure drop threshold for motor-pump transition - Перепад давления, при котором инициируется плавный переход между режимами двигателя и насоса1e-3 MPa (по умолчанию) | скаляр с модулями измерения давленияПерепад давления между входным и выходным отверстиями, ниже которого компонент начинает переход между режимами мотора и насоса. Гиперболическое Tanh функция преобразует уровень утечек и крутящий момент трения таким образом, чтобы переход был непрерывным и плавным.
Angular velocity threshold for motor-pump transition - Скорость вращения, с которой можно инициировать плавный переход между режимами насоса и двигателя10 rad/s (по умолчанию) | скаляр с модулями измерения угол/времяУгловая скорость вала, ниже которой начинает переход между режимами мотора и насоса компонент. Гиперболическое Tanh функция преобразует уровень утечек и крутящий момент трения таким образом, чтобы переход был непрерывным и плавным.
Displacement threshold for motor-pump transition - Перемещение, при котором инициируется плавный переход между режимами насоса и мотора0.5 cm^3/rev (по умолчанию) | скаляр с модулями измерения объем/уголАбсолютное значение мгновенного хода, ниже которого компонент переходит между режимами двигателя и накачки. Гиперболическое Tanh функция преобразует уровень утечек и крутящий момент трения таким образом, чтобы переход был непрерывным и плавным.
Cross-sectional area at ports A and B - Площадь сечения входного и выходного отверстий компонента0.01 m^2 (по умолчанию) | положительная скалярная величина с модулями измерения площадиПлощадь сечения входного и выходного отверстий компонента. Площади приняты равными. Этот параметр должен быть больше нуля.
Check if operating beyond the motor mode - Режим предупреждения моделирования условий работы вне моторного режимаNone (по умолчанию) | WarningРежим предупреждения моделирования условий работы вне моторного режима. Предупреждение выдается, если двигатель переходит в режим накачки. Выберите Warning должно быть уведомлено, когда этот переход происходит. Предупреждение не приводит к остановке симуляции.
Mass flow rate into port A - Массовый расход жидкости в компонент через тепловой гидравлический порт A
1 kg/s (по умолчанию) | скаляр с модулями измерения массы/времениМасса жидкости, поступающей в компонент через вход в единицу времени в начале симуляции.
