Частный случай передачи движения происходит, когда вы хотите затормозить вращение компонента привода, замедляя его, пока он не остановится. Общим способом торможения движения является соединение вращающегося компонента с вращающимся заземлением. Можно представлять вращательное заземление с блоком Привязка Вращения (Mechanical Rotational Reference) из библиотеки Simscape™ Foundation. Поскольку вращательное заземление не может перемещаться, ось привода, заблокированная на вращательном заземлении, также не может перемещаться. Вы можете реализовать постепенное зацепление или разъединение компонента привода с вращающимся заземлением с помощью муфты, так же как вы используете муфту, чтобы соединить или отцепить два вращающихся вала постепенно.
Откройте модель. В MATLAB® в командной строке введите
sdl_clutch_acc_brake
Модель отличается двумя сцеплениями, одна из которых выступает в роли тормоза. Модель также включает фрикционное демпфирование для большего реализма. Время симуляции устанавливается равным inf (бесконечность). Для простоты в модели используется блок Disk Friction Clutch.
Модель муфты с тормозной муфтой
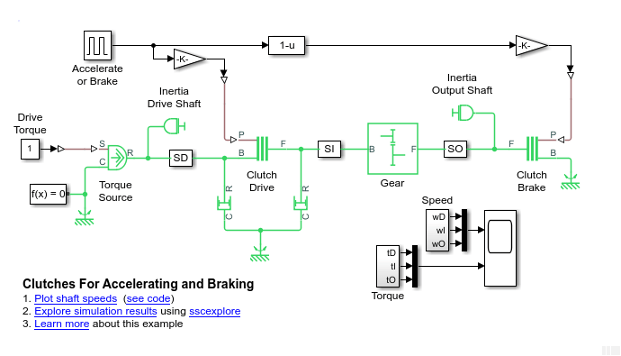
Эта модель использует базовую структуру инерции - сцепление - передачу - инерцию. Первый корпус, блок Inertia Drive Vaft, управляется внешним крутящим моментом, и начальные скорости равны 0. Существует, однако, еще одна муфта для второго тела, Инерция Выхода Блок Вала, которая может связать Инерцию Выхода Вал с блоком Механической Вращательной Ссылки и привести его к упору.
Узел переключения основан на переключателе сцепления. Можно изменить этот переключатель, чтобы применить постоянный сигнал давления сцепления либо к блоку Привод сцепления, либо к блоку Тормоз сцепления. Блок Fcn 1-u гарантирует, что давление полного сцепления прикладывается либо к тому, либо к другому, но не к обоим одновременно. Блоки Демпфера применяют вязкое (зависящее от скорости) трение к вращению Приводного Вала Инерции и Выходного Вала Инерции.
Блок Accelerate или Brake программируется, чтобы обеспечить сигнал 1 в течение первых 40 секунд симуляции. Он обеспечивает сигнал 0 для следующих 60 секунд симуляции.
Запустите модель.
В течение первых 40 секунд, когда блок Accelerate или Brake установлен в 1, давление сцепления прикладывается к муфте Gear. Муфта Gear входит в зацепление и блокирует приводной и ведомый валы и заставляет их вращаться с той же скоростью.
Выходной вал Инерции находится на другой стороне Простой Передачи. Скорость вращения Приводного Вала Инерции в два раза больше, чем у Выходного Вала Инерции, потому что передаточное отношение блока Простой Передачи составляет 2, далее по основанию. В этом режиме переключателя давление сцепления не прикладывается к тормозной муфте, которая остается без сцепления.
После начального переходного процесса система устанавливается в устойчивое состояние движения, где внешний крутящий момент уравновешивает потери на трение.
На t = 40 секундах блок Accelerate или Brake переключается на 0 для расцепления муфты привода и сцепления с муфтой тормоза. Система подвергается другому переходному процессу, в то время как муфта Gear отключается и муфта тормоза входит в зацепление.
Скорость вращения Приводного Вала Инерции и вала драйвера устанавливается до нового устойчивого состояния 10 радиан/секунду, вдвое больше его старой скорости.
Поскольку муфта Gear теперь отключена, ведомый вал и выходной вал Инерции больше не подвержены приводному крутящему моменту через муфту Gear. Но муфта Тормоза включена и соединяет Выходной Вал Инерции с неподвижной Механической Вращательной Ссылкой. После включения кинетическое трение Тормоза муфты приводит ведомый вал и выходной вал Инерции к упору.
Чтобы увидеть переходное поведение в начале симуляции и при переключении муфт:
Запустите симуляцию и дайте ей работать в течение короткого времени. Затем переключите переключатель муфты в другой режим.
Через короткое время остановите симуляцию. Используйте Autoscale функцию Scopes, чтобы захватить всю последовательность симуляции. Переходные процессы от начального поведения и перехода переключения видны.
Например, на этих графиках модель начиналась с переключателя Clutch Switch, установленного на 1 (сцепление с шестерней заблокировано, сцепление с тормозом отключено, торможения нет). Скорости быстро поднялись до своих установившихся значений. Затем Clutch Switch был изменен на 40 секундах времени симуляции. Сцепление с шестерней отключено, и сцепление с тормозом включено, тормозное Inertia2. Скорость вращения вала драйвера выросла с 5 до 10 радиан/секунду. Скорость вращения ведомого вала снизилась с 5 до 0. Скорость вращения Inertia2 снизилась с 2,5 до 0.
![]()
