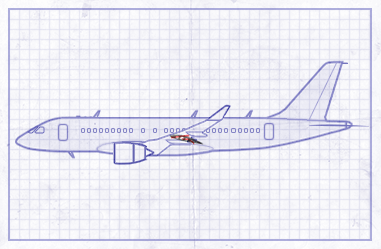
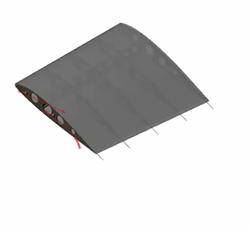
В этом примере показано, как применить несколько ограничений «точка на кривой» к одному телу. Пример основан на частичной модели закрылка самолета, который простирается и убирается ездой на изогнутых путях. Вы завершаете модель, добавляя ограничения «точка на кривой» между двумя точками на закрылке и кривыми дорожки закрылка. Рисунок показывает результаты визуализации модели закрылка, когда она завершена.
В MATLAB® в командной строке введите smdoc_poc_flap_start. Simscape™ Multibody™ программное обеспечение открывает модель сборки закрылков. Сохраните модель с другим именем в удобной папке, чтобы вы непреднамеренно не перезаписали модель.
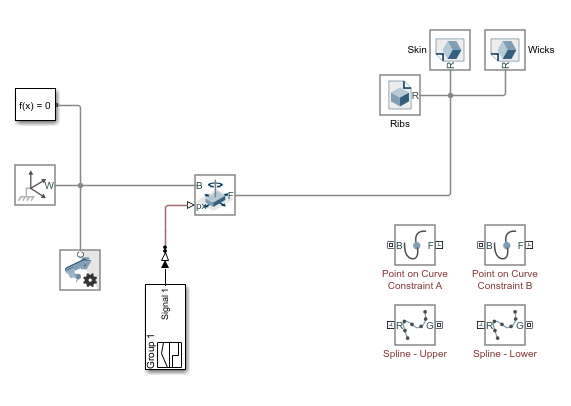
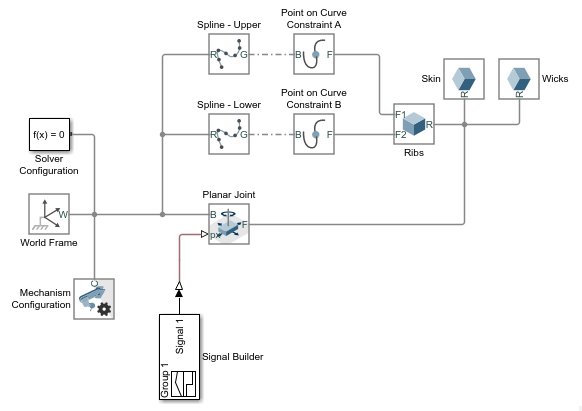
Модель пропускает ключевые соединительные линии и параметры блоков и еще не моделирует. Три жестко соединенных блоки, названные Ребра, Кожа и Фитили, представляют корпус лоскута. Блок Planar Joint соединяет это тело с мировой системой координат с тремя степенями свободы - одной вращательной и двух поступательных.
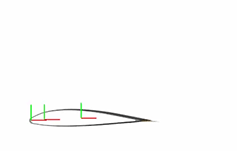
Клапан находится в этой точке без ограничений. В этом состоянии степени свободы клапана являются такими, которые предусмотрены блоком Planar Joint. Клапан свободно вращается вокруг оси z, перемещается вдоль оси x и перемещается вдоль оси y. Анимированные рисунки показывают эти движения. Оси системы координат закодированы по цвету, с красным цветом, обозначающим x, зеленые y и синие z. Точки z-оси вне экрана не видны на рисунке.
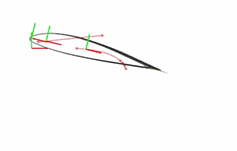
Ограничения точки на кривой связывают первоначально независимые движения клапана так, что любого из этих движений достаточно, чтобы полностью определить траекторию клапана. Например, в полностью ограниченном клапане перемещение вдоль оси x определяет также перемещение вдоль оси y и вращение вокруг оси z. Анимированный рисунок показывает ограниченное движение, которое вы получаете в конце этого примера.
В File Solid диалогового окна блока ребер разверните узел Frames и нажмите![]() кнопку. Откроется интерфейс создания системы координат. Этот интерфейс используется для создания новой системы координат и настройки ее положения и ориентации относительно стереометрии.
кнопку. Откроется интерфейс создания системы координат. Этот интерфейс используется для создания новой системы координат и настройки ее положения и ориентации относительно стереометрии.
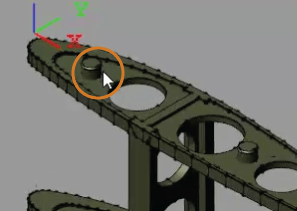
На панели визуализации увеличьте изображение верхнего фрагмента клапана и выберите верхнюю поверхность крайнего цилиндрического выступа, как показано на рисунке. Панель визуализации подсвечивает выбранную поверхность и показывает ее вектор normal.

В Frame Origin области интерфейса создания системы координат нажмите переключатель Based on Geometric Feature, а затем кнопку Use Selected Feature. Система координат перемещается к центру выбранной поверхности.
Нажмите кнопку Save, чтобы добавить новую систему координат в твердое тело. Блок предоставляет новый порт, F1, соответствующий новой системе координат. Вы можете переименовать систему координат все, что хотите, но, в этом примере, имя по умолчанию достаточно.
Повторите шаги 1-4, чтобы создать вторую систему координат с источником на верхней поверхности крайнего левого цилиндрического выступа, как показано на рисунке. Блок предоставляет новый порт, F2, соответствующий новой системе координат.
Соедините порт системы координат каждого блока Spline с блоком World Frame. Это соединение гарантирует, что ограничительные кривые, заданные в блоках Spline, будут разрешены в лабораторной системе координат. Определения кривых в настоящее время являются параметрами по умолчанию для блоков. Позже вы измените эти значения по умолчанию, чтобы получить разумную траекторию закрылка.
Соедините порты системы координат блоков Point on Curve Constraint с портами системы координат, которые вы добавили в блок File Solid ребер (F1 и F2). Источники этих систем координат являются точками, которые вы ограничиваете в этом примере.
Соедините порты геометрии блоков Spline с портами геометрии блоков Point on Curve Constraint как показано на рисунке. Геометрические соединительные линии идентифицируют определения сплайн как кривые, подлежащие ограничению.
Откройте Model Explorer и на панели Model Hierarchy разверните узел smdoc_poc_cam_start > Model Workspace. Model Explorer позволяет вам задать переменные рабочей области, чтобы можно было ссылаться на них в параметрах диалогового окна блока.
На панели Model Workspace Model Explorer установите параметр Data source равным MATLAB Code. Появляется поле, доступное для редактирования, с все еще неполными определениями переменных:
theta = linspace(4*pi/12,pi/8,4)'; lowerTrack = []; upperTrack = [];
lowerTrack и upperTrack являются ограничительными кривыми нижней и верхней дорожек закрылков. Переменная theta - область значений угла, используемая в определении кривой нижнего пути. Заполните lowerTrack и upperTrack определения путем определения нескольких точек на кривых, как показано на следующем фрагменте кода. Чтобы применить изменения к модели, необходимо нажать кнопку Reinitialize from Source. Новые фрагменты кода показаны синим цветом.
theta = linspace(4*pi/12,pi/8,4)'; lowerTrack = [350 0; (640+100*cos(theta)) (130*sin(theta)-210)]; upperTrack = [50 50; 550 100];
В диалоговом окне каждого блока Spline задайте параметры, перечисленные в таблице. Параметр Interpolation Points определяется в терминах переменного MATLAB из рабочего пространства модели. Убедитесь, что этот параметр в единицах mm. Параметр Color задан как нормированный вектор RGB, соответствующий световому оттенку красного цвета.
| Блок | Interpolation Points | Graphic> Visual Properties + Color |
|---|---|---|
| Сплайн - Верхний | upperTrack | [0.8, 0, 0] |
| Сплайн - Нижний | lowerTrack | [0.8, 0, 0] |
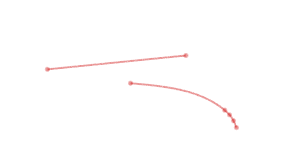
Обновите блок. На вкладке Modeling нажмите Update Model. Mechanics Explorer откроется статической визуализацией модели в ее начальном строении. Рисунок показывает сплайн, которые появляются в Mechanics Explorer с скрытыми телами. Можно скрыть тело, выбрав его узел на панели древовидного представления и выбрав Hide This.
Симулируйте модель. Mechanics Explorer показывает динамическую визуализацию узла закрылка. Движение лоскута теперь ограничено, так что источники созданных вами систем координат всегда лежат на заданных вами кривых. Переключение между стандартными видами Mechanics Explorer или вращение, панорамирование и масштабирование, чтобы лучше исследовать закрылок и его движение.
Чтобы открыть полную версию модели сборки закрылков, в командной строке MATLAB введите smdoc_poc_flap.
