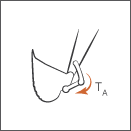
Идентифицируйте приводимые в действие соединения и тип приведения в действие. Затем моделируйте входы приведения в действие как изменяющиеся во времени физические сигналы и соединяйте их с различными шарнирами. См. пример в разделе «Задание крутящего момента приведения в действие соединений».
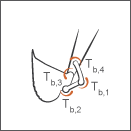
Моделируйте демпфирование и поведение пружины в соединениях. Задайте коэффициенты демпфирования соединений, чтобы смоделировать рассеивание энергии и коэффициенты упругости соединений, чтобы смоделировать накопление энергии.
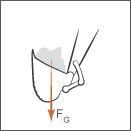
Идентифицируйте силы и крутящие моменты, действующие на тела или между ними, не соединенные шарнирами. Моделируйте эти силы и крутящие моменты явно используя блоки Forces и Torques. См. пример Модели гравитации в планетной системе.
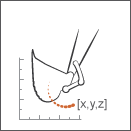
Идентифицируйте силы, крутящие моменты и переменные движения, которые нужно чувствовать. Можно чувствовать эти переменные в соединениях через блоки соединений. Можно также почувствовать переменные движения с помощью блока Transform Sensor. Смотрите Sense Motion Using a Transform Sensor Block для примера.
