В этом примере показано, как изменить параметры электропривода с помощью модели AC3 привода. В этом примере номинальная степень мотора изменяется с 200 л.с. до 5 л.с. Чтобы вернуть параметры привода:
Откройте пример: ac3_example. Тип ac3_example в MATLAB® Командное окно.
Параметры установлены для мотора мощностью 200 л.с.
Симулируйте модель в режиме Accelerator и наблюдайте результаты.
Дважды кликните Field-Oriented Control Induction Motor Drive блок и выберите вкладку Asynchronous Machine. Скопируйте эти параметры двигателя 5 л.с. в маску привода.
| Параметр | Значение |
|---|---|
| Система координат | Rotor |
| Дискретная модель решателя | Forward Euler |
| Электрические параметры > Номинальные значения > Степень | 3730 |
| Электрические параметры > Номинальные значения > Напряжение | 460 |
| Электрические параметры > Номинальные значения > Частота | 60 |
| Электрические параметры > Эквивалентные значения цепи > Статор основной обмотки > Сопротивление | 1.115 |
| Электрические параметры > Эквивалентные значения цепи > Статор основной обмотки > Индуктивность утечек | 0.005974 |
| Электрические параметры > Эквивалентные значения цепи > Статор основной обмотки > Взаимная индуктивность | 0.2037 |
| Электрические параметры > Эквивалентные значения цепи > Основной ротор обмотки > Сопротивление | 1.083 |
| Электрические параметры > Эквивалентные значения цепи > Ротор основной обмотки > Индуктивность утечек | 0.005974 |
| Электрические параметры > Начальные токи > Ia_Magnitude | 0 |
| Электрические параметры > Начальные токи > Ia_Phase | 0 |
| Электрические параметры > Начальные токи > Ib_Magnitude | 0 |
| Электрические параметры > Начальные токи > Ib_Phase | 0 |
| Электрические параметры > Начальные токи > Ic_Magnitude | 0 |
| Электрические параметры > Начальные токи > Ic_Phase | 0 |
| Механические параметры > Инерция | 0.02 |
| Механические параметры > Коэффициент трения | 0.005752 |
| Механические параметры > Пары полюсов | 2 |
| Начальные значения > Скольжение | 1 |
| Начальные значения > Угол | 0 |
Чтобы измерить сигналы, связанные с регулятором потока, добавьте эти блоки в подсистему demux.
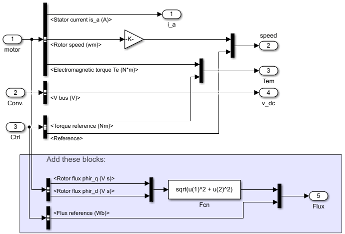
Выберите вкладку Controller в маске блока Field-Oriented Control Induction Motor Drive. Установите Regulation type равным Torque regulation для доступа к параметрам контроллера.
Режим регулирования крутящего момента необходим, чтобы обойти параметры регулятора скорости и воздействовать непосредственно на векторный контроллер управления (FOC).
Ток, управляемый контроллером FOC, зависит от потока машины. Контроллер потока обеспечивает правильное применение необходимого потока к машине.
Скопируйте эти параметры в маску диска:
| Параметр | Значение |
|---|---|
| Поток машины > Начальный | 0.705 |
| Поток машины > Номинальный | 0.705 |
| Векторное управление > контроллер потока > Пропорциональная составляющая | 1 |
| Векторное управление > Контроллер потока > Интегральная составляющая | 0 |
| Векторное управление > контроллер потока > Нижняя частота отключения фильтра | 10e3 |
| Векторное управление > контроллер потока > Выходные пределы потока > Отрицательный | -0.705*1.5 |
| Векторное управление > контроллер потока > Выходные пределы потока > Положительный | 0.705*1.5 |
| Векторное управление > Токовый контроллер полосу гистерезиса | 1 |
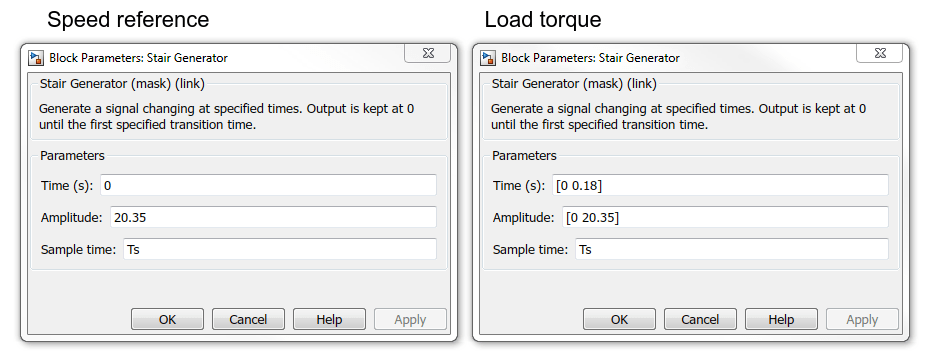
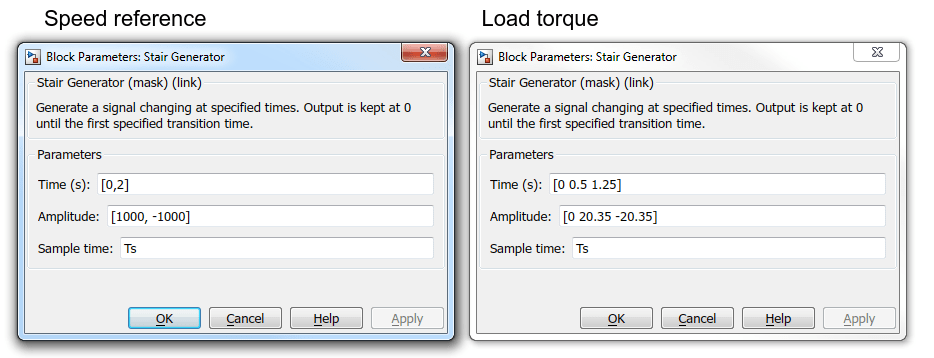
Чтобы применить номинальный крутящий момент к двигателю, измените параметры блоков Stair Generator в подсистеме ссылки скорости и в подсистеме крутящего момента нагрузки.
На вкладке Logging блока Scope установите Decimation 1 и Variable name к simout1. Выберите Log data to workspace и установите Save format равным Structure With Time.
Симулируйте систему на 0,5 с. Откройте инструмент FFT Analysis блока powergui.
В списке Input выберите Stator current и установите Start time в 0.23, Number of cycles к 1, Fundamental frequency к 7.5, и Max Frequency (Hz) к 20000 Гц.
Щелкните Display, чтобы получить график БПФ.
Обратите внимание, что частота переключения составляет около 5 кГц. Чтобы ослабить эту частоту, установите параметр Low-pass filter cutoff frequency контроллера Flux на 500 Гц.
Откройте блок Scope и наблюдайте сигнал потока. Обратите внимание, что статическая ошибка высока.

Постепенно увеличивайте параметр Proportional gain контроллера Flux и симулируйте, пока вы не получите удовлетворительный ответ. Увеличение усиления выше определенного значения может вызвать насыщение контроллера Flux. Кривая на следующем графике основана на пропорциональной составляющей 100.

Постепенно увеличивайте Integral gain контроллера Flux и моделируйте, пока вы не получите удовлетворительный установившийся результат с минимальной ошибкой. Следующий график основан на интегральной составляющей 90.
Выберите вкладку Controller в маске Field-Oriented Control Induction Motor Drive блока и установите Regulation type равной Speed regulation для редактирования параметров контроллера.
| Параметр | Значение |
|---|---|
| Контроллер скорости > Выходные пределы крутящего момента > Отрицательный | -1200*1.5 |
| Контроллер скорости > Выходные пределы крутящего момента > Положительный | 1200*1.5 |
| Контроллер скорости > ПИ-регулятор > Пропорциональная составляющая | 1 |
| Контроллер скорости > ПИ-регулятор > Интегральная составляющая | 0 |
| Контроллер скорости > Частота отключения скорости | 500 |
| Векторное управление > Максимальная частота переключения | 500 |
Ускорение наклона скорости должно быть рассчитано, чтобы избежать превышения выходного крутящего момента. Необходимый крутящий момент для ускорения двигателя со скоростью 1750 об/мин/с задается:
Чтобы применить номинальный крутящий момент к двигателю, измените параметры блоков Stair Generator в подсистеме ссылки скорости и в подсистеме крутящего момента нагрузки.
Установите десятикратное уменьшение децимации возможностей, чтобы предотвратить перегрузку памяти. Запустите симуляцию.
Наблюдайте сигнал скорости на блоке Scope. Ошибка устойчивого состояния высока, и время отклика неприемлемо.

Постепенно увеличивайте параметр Proportional gain контроллера скорости и симулируйте, пока вы не получите удовлетворительное время отклика без перерегулирования. Обратите внимание, что если коэффициент усиления слишком высок, система будет колебаться. Следующий график основан на пропорциональной составляющей 3.

Постепенно увеличивайте Integral gain контроллера скорости и моделируйте, пока вы не получите удовлетворительное значение устойчивого состояния с минимальной установившейся ошибкой. Эта кривая основана на интегральной составляющей 100.
Выберите вкладку Converter and DC bus в маске блока Field-Oriented Control Induction Motor Drive, чтобы настроить конденсатор шины постоянного тока и параметры тормозного измельчителя.
Установите параметр DC Bus Capacitance равным 167e-6 .
Емкость шины постоянного тока вычисляется порядком, чтобы уменьшить пульсацию напряжения.
где:
Pmotor - номинальная степень привода мотора (W).
f - частота источника переменного тока (Гц).
Β V является желаемой пульсацией напряжения (V).
VDC - среднее напряжение шины постоянного тока (V).
Это уравнение дает приблизительное значение конденсатора, необходимое для заданного уровня пульсации напряжения. Здесь желаемая пульсация напряжения составляет 50 В.
Привод мотора мощностью 5 л.с. (3728 Вт) питается от трехфазного источника 60 Гц. Среднее напряжение шины постоянного тока определяется:
VDC = 1.35 · VLL,
Необходимый конденсатор тогда равен
Установите Braking chopper Shutdown voltage на 660V, а Braking chopper Activation voltage на 700 В.
В моторном режиме пиковое напряжение шины постоянного тока равно
Напряжение завершения работы (Vshut) тормозного измельчителя должно быть немного бита выше этого значения. Чтобы ограничить увеличение напряжения во время регенеративного торможения, напряжение завершения работы устанавливается на 660 В, а напряжение активации (Vact) устанавливается на 700 В.
Установите Resistance Тормозного рубителя на 131 Ом.
Сопротивление тормозного измельчителя вычисляется с помощью этого уравнения:
Симулируйте систему и наблюдайте шесть разделов результатов симуляции.
Ускорение без нагрузки
Прикладывается номинальный крутящий момент нагрузки
Установившаяся скорость
Применяется номинальный крутящий момент генерации: Наблюдайте перерегулирование напряжения шины постоянного тока
Замедление
Отрицательное ускорение скорости
