Дискретное время бесщеточный двигатель постоянного тока с ПИ-контроллером модуляции ширины импульса
Simscape / Электрический / Контроль / Контроль BLDC
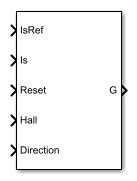
Блок BLDC Current Controller with PWM Generation генерирует сигнал модуляции ширины импульса (PWM) и управляет током в бесщеточном двигателе постоянного тока. Контроллер использует этот алгоритм.
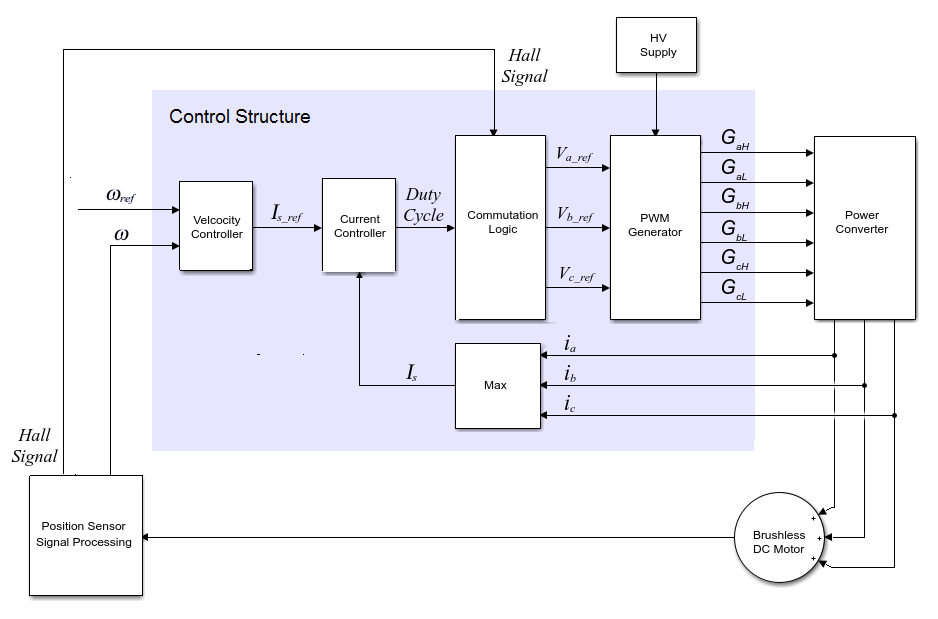
Этот BLDC Current Controller with PWM Generation производит коэффициент заполнения для блока BLDC путем реализации пропорционально-интегрального (PI) управления током с помощью этого уравнения
где:
D - коэффициент заполнения.
Kp - пропорциональная составляющая.
Ki - интегральная составляющая.
Ts - период времени.
Is_ref - ссылочный ток.
Is - измеренный ток.
Gzc - полином нулевой отмены.
Передаточная функция с обратной связью для алгоритма управления ПИ-управления приводит к нулю, который может быть отменен при помощи блока нулевой отмены в пути с feedforward. Передаточная функция аннулирования нуля в дискретном времени:
Блок получает сигналы управления для трех фаз путем умножения коэффициента заполнения на сигналы коммутации. Получившиеся три управляющих сигнала нормированы в течение интервала [-1, 1].
Генератор PWM выводит значение 1, когда значение сигнала управления больше, чем значение счетчика несущей. В противном случае генератор PWM выводит 0.
[1] Стирбан, А., И. Болдея, и Г. Д. Андрееску. «Бездатчиковое управление двигателем BLDC-PM с автономным FEM-информационным наблюдателем и наблюдателем скорости». Транзакции IEEE для отраслевых приложений. 48, № 6 (2012): 1950-1958.
