Трехобмоточный бесщеточный двигатель постоянного тока с распределением трапеций
Simscape/Электрический/Электромеханический/Постоянный магнит
Блок BLDC моделирует синхронную машину с постоянными магнитами с трехфазным статором с соединением обмоток в «звезду». Блок имеет четыре опции для определения распределения потока постоянных магнитов как функции от угла ротора. Две опции допускают простую параметризацию путем принятия идеальной трапеции для коэффициента противо-ЭДС. Для простой параметризации вы задаете редактирование потока или коэффициента противо-ЭДС, вызванную ротором. Другие две опции дают более точные результаты с помощью табличных данных, которые вы задаете. Для более точных результатов вы задаете либо частную производную редактирования, либо измеренный коэффициент противо-ЭДС, постоянная для заданной скорости ротора.
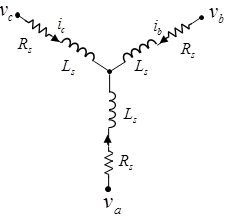
Рисунок показывает эквивалентную электрическую схему для обмоток статора.
Этот рисунок показывает конструкцию мотора с одной парой полюсов на роторе.
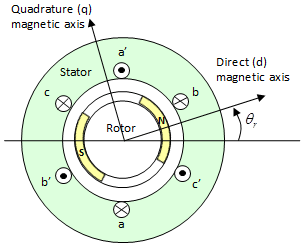
Для соглашения о осях на предыдущем рисунке a-фазы и потоки постоянных магнитов выравниваются, когда угол θr ротора равен нулю. Блок поддерживает второе определение оси ротора. Для второго определения угол ротора является углом между магнитной осью a-фазы и осью q ротора.
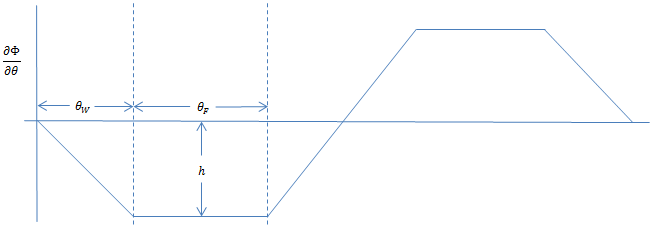
Магнитное поле ротора от постоянных магнитов создает трапециевидную скорость изменения потока с углом ротора. Рисунок показывает эту скорость изменения потока.
Коэффициент противо-ЭДС - скорость изменения потока, заданная как
где:
Φ - редактирование потока постоянных магнитов.
θ - угол ротора.
ω - механическая скорость вращения.
Высота h трапеций скорости изменения профиля потока получают из пикового потока постоянных магнитов.
Интеграция по области значений 0,
где:
Φmax - редактирование потока постоянных магнитов.
h - скорость изменения высоты профиля потока.
θF - угол области значений ротора, над которым коэффициент противо-ЭДС, который индуцирует поток постоянных магнитов в статоре, является постоянным.
θW - область значений углов ротора, в котором коэффициент противо-ЭДС увеличивается или уменьшается линейно, когда ротор движется с постоянной скоростью.
Переставляя предшествующее уравнение,
Напряжения на обмотках статора определяются
где:
va, vb и vc являются внешними напряжениями, приложенными к трем электрическим соединениям мотора.
Rs - эквивалентное сопротивление каждой обмотки статора.
ia, ib и ic являются токами, текущими в обмотках статора.
и
- скорости изменения магнитного потока в каждой обмотке статора.
Постоянные магниты и три обмотки способствуют общему потоку, связывающему каждую обмотку. Общий поток определяется
где:
ψa, ψb и ψc являются суммарными потоками, связывающими каждую обмотку статора.
Laa, Lbb и Lcc являются самоиндуктивностями обмоток статора.
Lab, Lac, Lba и т.д. являются взаимными индуктивностями обмоток статора.
ψam, ψbm и ψcm являются потоками постоянных магнитов, связывающими обмотки статора.
Индуктивности в обмотках статора являются функциями угла ротора, заданными как
и
где:
Ls является самоиндуктивностью статора на фазу - средняя самоиндуктивность каждой из обмоток статора.
Lm - индуктивность статора - колебание самоиндуктивности и взаимной индуктивности с изменением угла ротора.
Ms является взаимной индуктивностью статора - средняя взаимная индуктивность между обмотками статора.
Поток постоянных магнитов, связывающий каждую обмотку статора, следует трапеций, показанных на рисунке. Блок реализует трапеций профиля с помощью интерполяционных таблиц, чтобы вычислить значения потока постоянных магнитов.
Определяющие уравнения напряжения и крутящего момента для блока
и
где:
vd, vq и v0 являются d осью, q осью и напряжениями нулевой последовательности.
P - трансформация Парка, заданная как
N - количество пар полюсов постоянных магнитов ротора.
ω - механическая скорость вращения ротора.
и
являются частными производными мгновенного потока постоянных магнитов, связывающих каждую фазную обмотку.
id, iq и i0 являются d -осью, q -осью и токами нулевой последовательности, заданными как
Ld = Ls + Ms + 3/2 <reservedrangesplaceholder2>. Ld - индуктивность d оси статора.
Lq = Ls + <reservedrangesplaceholder3> − 3/2 <reservedrangesplaceholder2>. Lq - индуктивность q оси статора.
L0 = Ls – 2 Ms. L0 - индуктивность нулевой последовательности статора.
T - крутящий момент ротора. Крутящий момент течет от корпуса мотора (блокирующий физический порт C) к ротору мотора (блокирующий физический порт R).
Потери в железе разделены на два члена, один из которых представляет основную траекторию намагничивания, а другой представляет траекторию поперечного совета зуба, которая становится активной во время ослабленных операций поля. Модель потерь в железе, которая основана на работе Меллора [3].
Термин, представляющий основной путь намагниченности, зависит от индуцированного напряжения статора RMS, :
Это доминирующий термин во время работы без нагрузки. k является коэффициентом противо-ЭДС, постоянная, относящимся к RMS В на Гц. Он определяется как , где f является электрической частотой. Первый член на правой стороне является потерей магнитного гистерезиса, второй - потеря токов Фуко, третий - избыточные потери. Три коэффициента, появляющиеся на числителях, получают из значений, которые вы обеспечиваете для гистерезиса без обратной связи, вихря и избыточных потерь.
Термин, представляющий путь совета поперек зуба, становится важным, когда устанавливается поле размагничивания, и может быть определен из анализа короткой схемы тестирования конечного элемента. Это зависит от RMS ЭДС, связанной с потоком поперечных советов, :
Три члена числителя получают из значений, которые вы обеспечиваете для гистерезиса короткой схемы, вихря и избыточных потерь.
Блок имеет четыре дополнительных тепловых порта, по одному для каждой из трех обмоток и по одному для ротора. Эти порты по умолчанию скрыты. Чтобы открыть тепловые порты, щелкните правой кнопкой мыши блок в модели, выберите Simscape > Block choices, а затем выберите требуемый вариант блока с тепловыми портами: Composite three-phase ports | Show thermal port или Expanded three-phase ports | Show thermal port. Это действие отображает тепловые порты на значке блока и отображает параметры Temperature Dependence и Thermal Port. Эти параметры описаны далее на этой странице с описанием.
Используйте тепловые порты, чтобы симулировать эффекты сопротивления меди и потерь в железе, которые преобразуют электрические степени в тепло. Для получения дополнительной информации об использовании тепловых портов в блоках привода, смотрите Симуляция термальных эффектов во Вращательном и Поступательном приводах.
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Задать приоритет и Начальный целевой объект для основных переменных.
[1] Кундур, П. Устойчивость системы Степени и Управление. Нью-Йорк, Нью-Йорк: McGraw Hill, 1993.
[2] Андерсон, П. М. Анализ неисправных степеней. Hoboken, NJ: Wiley-IEEE Press, 1995.
[3] Меллор, П.Х., Р. Вробель и Д. Холлидей. «Вычислительно эффективная модель потери в железе для бесщеточных машин переменного тока, которая удовлетворяет номинальным потокам и полевым ослабленным операциям». Конференция по электрическим машинам и приводам IEEE. Май 2009.


