Датчик положения индуктивного ротора с четырьмя индуктивными катушками
Simscape/Электрический/Датчики и датчики
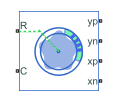
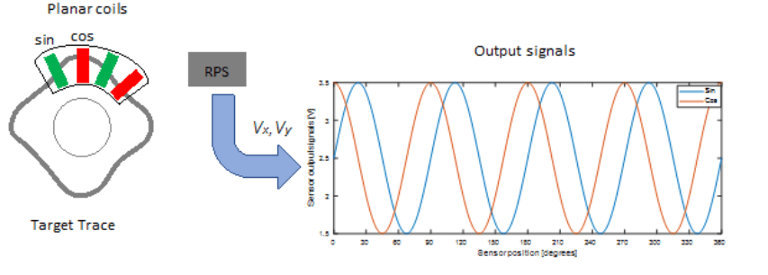
Блок Inductive Rotor Position Sensor использует теорию потерь токов Фуко, чтобы получить положение ротора. Он состоит из четырех плоских катушек и трассировки цели, которая обнаруживает положение ротора. Трассировка мишени имеет синусоидальную форму и выполнена из проводящего материала. Расстояние между четырьмя плоскими катушками эквивалентно 90 степеням одного цикла.
Напряжения между элементами датчика описываются уравнениями:
где:
vx - косинусоидное напряжение.
vy - синусоидальное напряжение.
Ax и Ay являются амплитудами напряжения для x и y осей, которые отражают несоответствие чувствительности.
Vx0 и Vy0 являются смещениями напряжения для осей x и y.
N - количество пар полюсов.
θ - механическое положение.
β - квадратурная ошибка.
K - это крутящий момент.
Блок использует это уравнение, чтобы декодировать угол:
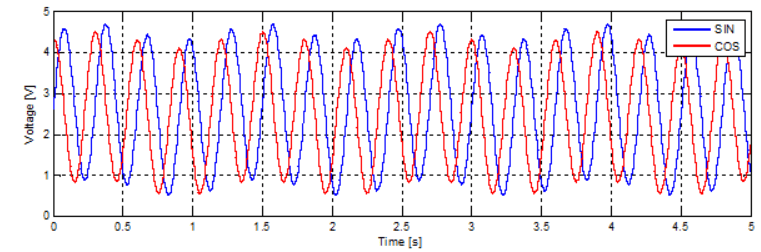
Этот рисунок показывает эффекты коэффициента свертывания:
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Задать приоритет и Начальный целевой объект для основных переменных.
