Синхронный регулятор машины с падением частоты
Simscape/Электрический/Управление/SM Управление
Блок SM Governor with Droop реализует регулятор синхронной машины (SM) с характеристикой падения. Используйте этот блок для регулирования или управления входом дросселя в основной двигатель, приводящий в действие синхронный генератор.
Блок использует ошибку между измеренной и желаемой скоростью генератора, чтобы задать положение основного двигателя. Для примера, когда основной двигатель вращается слишком медленно, дроссель открывается, чтобы увеличить вход энергии генератору и увеличить его скорость.
Когда несколько управляемых регулятором генераторов подключены параллельно, характеристики падения гарантируют общую стабильность сетки. Падение определяется как процентное изменение скорости от без нагрузки до полной нагрузки генератора. Этот рисунок показывает отношение скорость-нагрузка для регулятора с падением на 5%.
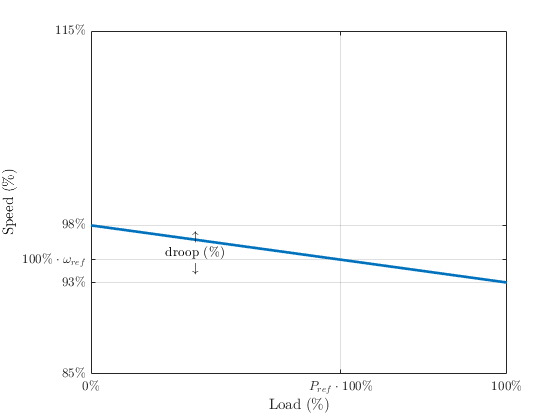
Вот,
ωref - задающая скорость губернатора. Установите это значение в относительных единицах с помощью порта speed_ref.
Pref - ссылка нагрузка губернатора. Установите это значение в относительных единицах с помощью порта P_ref.
droop - процент падения губернатора. Установите это значение в процентах с помощью параметра Percentage droop, (%).
Блок вычисляет эталонное положение дросселя, выраженное в относительных величинах, как:
где ω - фактическая скорость генератора в относительных единицах.
Инерция клапана вводит задержку между этим исходным положением дросселя и фактическим положением дросселя, которая моделируется как задержка первого порядка:
Здесь Ts является временной константой. Установите это значение с помощью параметра Time constant of governor, (s).

