Импортируйте лестничную схему в подсистему Simulink
[генерирует представление Simulink лестничной схемы в файле L5X со свойствами, заданными с помощью одного или нескольких mdlname,mdllib,genbusscript] = plcimportladder(filename,Name,Value)Name,Value аргументы в виде пар.
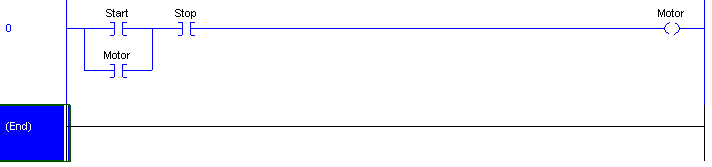
Следующий пример демонстрирует, как импортировать простую лестничную схему из файла L5X (simpleController.L5X) в окружение Simulink. Создайте simpleController.L5X при помощи RSLogix 5000 IDE. Лестничная схема содержит контакты и катушки, представляющие разъединители и двигатель. Ниже приведен моментальный снимок структуры лестничной схемы.
Используйте plcladderimport функция для импорта созданной лестничной схемы в Simulink. В данном примере программа Name лестницы MainProgram и MainRoutineName является MainRoutine.
[mdlName,mdlLib,busScript] = plcimportladder('simpleController.L5X','OpenModel','On')
mdlName =
'simpleController'
mdlLib =
'simpleController_lib'
busScript =
[]Импортированная модель содержит PLC Controller блок с именем simpleController, далее следует Task блок с именем MainTask и, наконец, Ladder Diagram Program блок с именем MainProgram. Модель, импортированная в Simulink, имеет блоки, которые реализуют функциональность контактов и катушек.
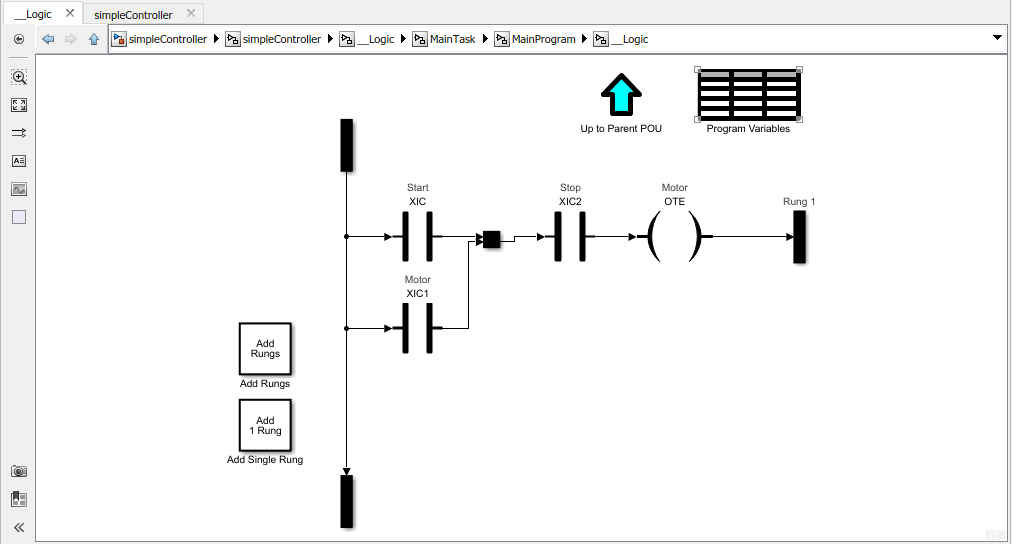
Можно обойти эти организационные блоки, дважды щелкнув мышью на Up to Parent POU элемент. The Program Variables электронная таблица содержит переменные Start, Stop, и Motor. Можно использовать эту таблицу для изменения атрибутов таких переменных, как Data Type, Initial Value, и size
plccleartypes | plcgeneratecode | plcgeneraterunnertb | plcladderlib | plcladderoption | plcloadtypes
