Радиолокационные сигналы обратного рассеяния от бициклиста
The backscatterBicyclist объект имитирует обратные рассеянные радиолокационные сигналы, отраженные от движущегося бициклиста. Велосипедист состоит как из велосипеда, так и из его всадника. Объект моделирует движение бициклиста и вычисляет сумму всех отраженных сигналов от нескольких дискретных рассеивателей в бициклисте. Модель игнорирует внутренние окклюзии внутри бициклиста. Отраженные сигналы основаны на мультискаттерной модели, разработанной радиолокационной системой на 77 ГГц.
Рассеиватели расположены на пяти основных велосипедных компонентах:
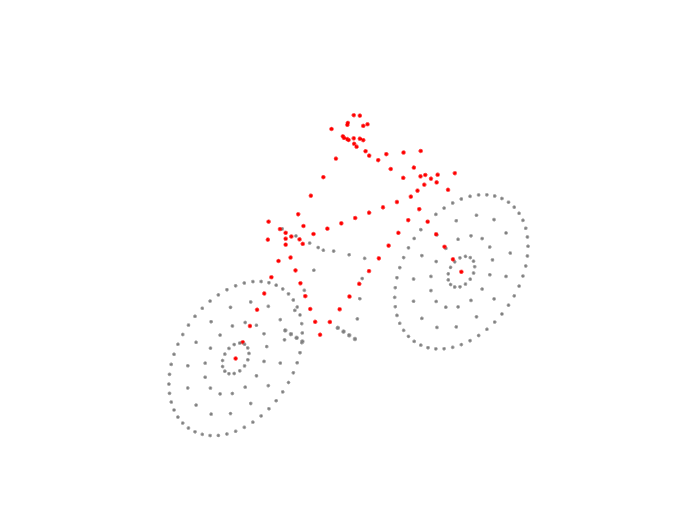
Велосипедная система координат и всадник
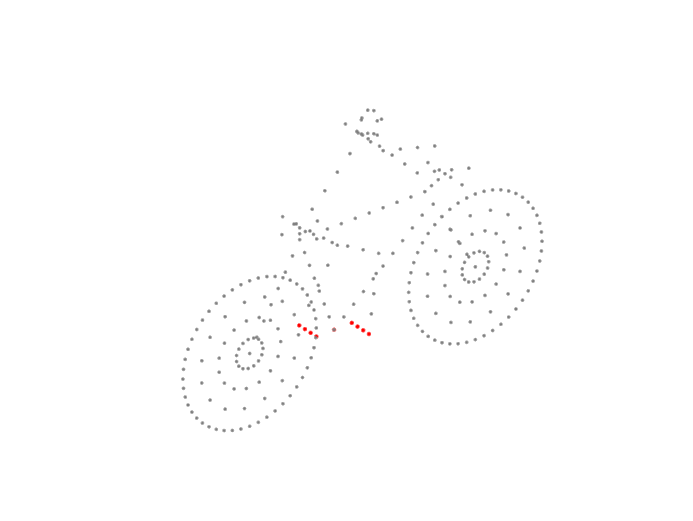
Педали велосипедов
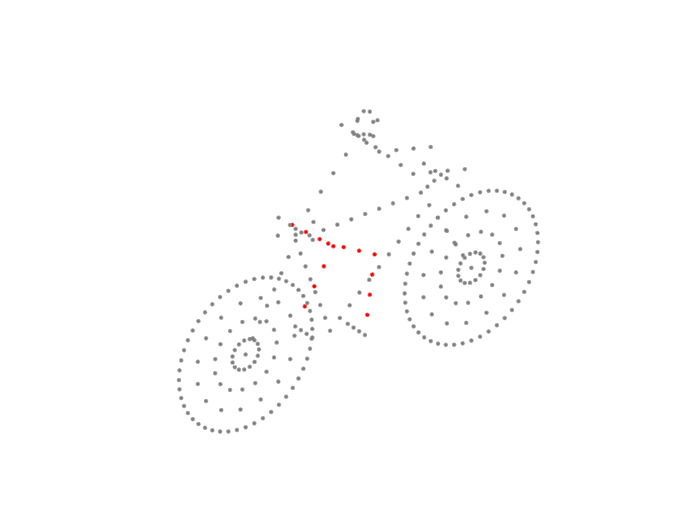
Верхняя и нижняя ноги всадника
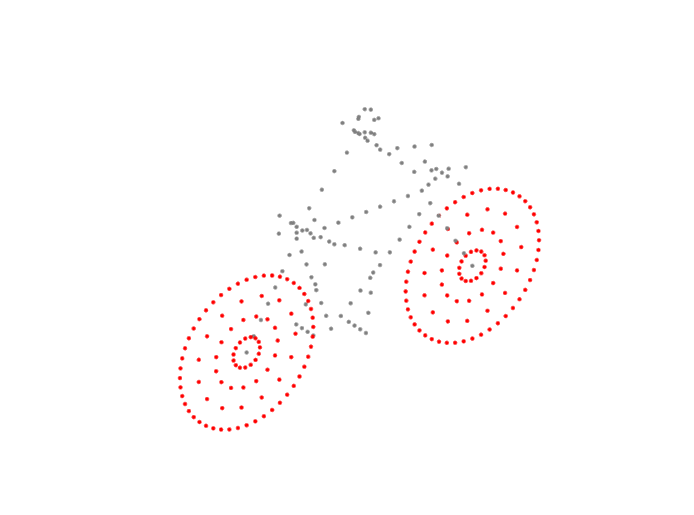
Переднее колесо
Заднее колесо
Кроме колес, на велосипедисте 114 разбрасывателей. Колеса содержат рассеиватели на ободе и спицы. Количество рассеивателей на колесах зависит от количества спиц на колесо. Количество спиц задается с помощью NumWheelSpokes свойство.
Вы можете получить текущее положение и скорость бициклиста, вызвав move функция объекта. Вызов этой функции также обновляет положение и скорость на следующую эпоху. Для получения отраженного сигнала вызовите reflect функция объекта. Вы можете построить график мгновенного положения велосипедиста, используя plot функция объекта.
bicyclist = backscatterBicyclist
bicyclist = backscatterBicyclist(Name,Value,...)
bicyclist = backscatterBicyclistbackscatterBicyclist объект, bicyclist, имеющих значения свойств по умолчанию.
bicyclist = backscatterBicyclist(Name,Value,...)backscatterBicyclist объект, bicyclist, с каждым заданным свойством Name установить на заданную Value. Можно задать дополнительные аргументы пары "имя-значение" в любом порядке как (Name1, Value1..., NameN, ValueN). Любые неопределенные свойства берут значения по умолчанию. Для примера,
bicyclist = backscatterBicyclist( ...
'NumWheelSpokes',18,'Speed',10.0, ...
'InitialPosition',[0;0;0],'InitialHeading',90, ...
'GearTransmissionRatio',5.5);Этот рисунок иллюстрирует бициклиста, который начинает поворачивать налево.

Вычислите сигнал обратного рассеяния радара от бициклиста, перемещающегося вдоль оси X на 5 м/с от радара. Предположим, что радар расположен в источник. Радар передает сигнал LFM на 24 ГГц с пропускной способностью 300 МГц. Сигнал отражается в момент начала движения велосипедиста и затем на одну секунду позже.
Инициализация объектов канала бициклиста, формы волны и распространения
Инициализируйте backscatterBicyclist, phased.LinearFMWaveform, и phased.FreeSpace объекты. Примите частоту дискретизации 300 МГц. Начальное положение велосипедиста лежит на оси X в 30 метрах от радара.
bw = 300e6; fs = bw; fc = 24e9; radarpos = [0;0;0]; bpos = [30;0;0]; bicyclist = backscatterBicyclist( ... 'OperatingFrequency',fc,'NumWheelSpokes',15, ... 'InitialPosition',bpos,'Speed',5.0, ... 'InitialHeading',0.0); lfmwav = phased.LinearFMWaveform( ... 'SampleRate',fs, ... 'SweepBandwidth',bw); sig = lfmwav(); chan = phased.FreeSpace( ... 'OperatingFrequency',fc, ... 'SampleRate',fs, ... 'TwoWayPropagation',true);
Постройте начальное положение бициклиста
Использование move функция объекта, получают начальные положения рассеивателя, скорости и ориентацию велосипедиста. Постройте график начального положения велосипедиста. The dt аргумент move функция object определяет, что следующий вызов move возвращает состояние движения велосипедиста dt секунд спустя.
dt = 1.0; [bpos,bvel,bax] = move(bicyclist,dt,0); plot(bicyclist)

Получите первый отраженный сигнал
Распространите сигнал на все рассеиватели и получите совокупный отраженный обратный сигнал.
N = getNumScatterers(bicyclist); sigtrns = chan(repmat(sig,1,N),radarpos,bpos,[0;0;0],bvel); [rngs,ang] = rangeangle(radarpos,bpos,bax); y0 = reflect(bicyclist,sigtrns,ang);
Постройте график положения бициклиста после обновления положения
После того, как велосипедист переместится, получите позиции и скорости рассеяния и затем переместите велосипед по его траектории еще на секунду.
[bpos,bvel,bax] = move(bicyclist,dt,0); plot(bicyclist)

Получите второй отраженный сигнал
Распространите сигнал на все рассеиватели в их новых положениях и получите совокупный отраженный обратный сигнал.
sigtrns = chan(repmat(sig,1,N),radarpos,bpos,[0;0;0],bvel); [~,ang] = rangeangle(radarpos,bpos,bax); y1 = reflect(bicyclist,sigtrns,ang);
Соответствие отраженных сигналов фильтра
Соответствие фильтрации отраженных сигналов и построение графика.
mfsig = getMatchedFilter(lfmwav); nsamp = length(mfsig); mf = phased.MatchedFilter('Coefficients',mfsig); ymf = mf([y0 y1]); fdelay = (nsamp-1)/fs; t = (0:size(ymf,1)-1)/fs - fdelay; c = physconst('LightSpeed'); plot(c*t/2,mag2db(abs(ymf))) ylim([-200 -50]) xlabel('Range (m)') ylabel('Magnitude (dB)') ax = axis; axis([0,100,ax(3),ax(4)]) grid legend('First pulse','Second pulse')

Вычислите различие в области значений между максимумами двух импульсов.
[maxy,idx] = max(abs(ymf)); dpeaks = t(1,idx(2)) - t(1,idx(1)); drng = c*dpeaks/2
drng = 4.9965
Область значений различия составляет 5 м, как и ожидалось с учетом скорости бициклиста.
Отобразите спектрограмму, показывающую эффект микродопплера на радиолокационные сигналы, отраженные от рассеивателей на движущейся бициклистской цели. Стационарный радар передает 1000 импульсов радиолокационной волны FMCW с шириной полосы 250 МГц и 1 длительность. Радар работает на 24 ГГц. Велосипедист стартует в 5 м от радара и уйдет со скоростью 4 м/с.
Настройте форму волны, канал, передатчик, приемник и системные объекты платформы.
bw = 250e6; fs = 2*bw; fc = 24e9; c = physconst('Lightspeed'); tm = 1e-6; wav = phased.FMCWWaveform('SampleRate',fs,'SweepTime',tm, ... 'SweepBandwidth',bw); chan = phased.FreeSpace('PropagationSpeed',c,'OperatingFrequency',fc, ... 'TwoWayPropagation',true,'SampleRate',fs); radarplt = phased.Platform('InitialPosition',[0;0;0], ... 'OrientationAxesOutputPort',true); trx = phased.Transmitter('PeakPower',1,'Gain',25); rcvx = phased.ReceiverPreamp('Gain',25,'NoiseFigure',10);
Создайте bicyclist объект движется со скоростью 4 метра/секунду.
bicyclistSpeed = 4; bicyclist = backscatterBicyclist('InitialPosition',[5;0;0],'Speed',bicyclistSpeed, ... 'PropagationSpeed',c,'OperatingFrequency',fc,'InitialHeading',0.0); lambda = c/fc; fmax = 2*bicyclist.GearTransmissionRatio*bicyclistSpeed/lambda; tsamp = 1/(2*fmax);
Цикл более 1000 импульсов. Найдите угол падения радара. Распространите волну на каждый рассеиватель, а затем отражайте волну от рассеивателей обратно на радар.
npulse = 1000; xr = complex(zeros(round(fs*tm),npulse)); for m = 1:npulse [posr,velr,axr] = radarplt(tsamp); [post,velt,axt] = move(bicyclist,tsamp,0); [~,angrt] = rangeangle(posr,post,axt); x = trx(wav()); xt = chan(repmat(x,1,size(post,2)),posr,post,velr,velt); xr(:,m) = rcvx(reflect(bicyclist,xt,angrt)); end
Обработайте поступающие сигналы. Сначала дешифруйте сигнал, а затем передайте сигнал в короткое преобразование Фурье с окном Кайзера.
xd = conj(dechirp(xr,x)); M = 128; beta = 6; w = kaiser(M,beta); R = floor(1.7*(M-1)/(beta+1)); noverlap = M - R; [S,F,T] = stft(sum(xd),1/tsamp,'Window',w,'FFTLength',M*2, ... 'OverlapLength',noverlap); maxval = max(10*log10(abs(S))); pcolor(T,-F*lambda/2,10*log10(abs(S))-maxval); shading flat; colorbar xlabel('Time (sec)') ylabel('Speed (m/s)')

Создайте пользовательский шаблон RCS для использования со backscatterBicyclist объект.
Шаблон RCS вычисляется из косинусов, повышенных до четвертой степени. Постройте график шаблона.
az = [-180:180]; el = [-90:90]; caz = cosd(az').^4; cel = cosd(el).^4; rcs = (caz*cel)'; imagesc(az,el,rcs) xlabel('Azimuth (deg)') ylabel('Elevation (deg)') colorbar

bicyclist = backscatterBicyclist( ... 'NumWheelSpokes',18,'Speed',10.0, ... 'InitialPosition',[0;0;0],'InitialHeading',90, ... 'GearTransmissionRatio',5.5,'AzimuthAngles',az, ... 'ElevationAngles',el,'RCSPattern',rcs);
Велосипедист состоит из пяти основных компонентов: велосипедная система координат и всадник, педали, ноги всадника, переднее колесо и заднее колесо. Каждый компонент содержит много рассеивателей. Все компоненты перемещаются со скоростью, определяемой заданными свойствами скорости и курса. В сложение ноги, педали и колеса подвергаются циклическому движению, определяемому скоростью.
Рассеиватели на системе координат и всадник фиксируются относительно велосипедиста и перемещаются со скоростью эго
где v - скорость бициклиста, заданная Speed свойство и H является заголовком, заданным InitialHeading свойство. Эти свойства можно изменить, вызвав move функция.
Этот рисунок показывает расположение рассеивателей на системе координат и всаднике.
Рассеиватели на педалях перемещаются вместе с велосипедистом, но могут также вращаться вокруг шпинделя кривошипа с радиусом вращения Rпед. Существует два возможных движения педалей в зависимости от того, является ли велосипед накручиванием (свободным ходом) или нет:
Когда велосипед накручивается, педали не вращаются вокруг шпинделя кривошипа, и скорость рассеивателей педали равна скорости велосипедиста. Их положения относительно велосипедиста фиксированы. Покрутка включена путем установки Coast свойство к true или путем установки coast аргумент move функция объекта в true. Скорость педали
Когда велосипед не накручивается, гонщик педалирует. Скорость вращения педалей связана с скоростью вращения колес
где G - передаточное число, заданное как GearTransmissionRatio свойство. Скорость рассеивателя педали равна скорости вращения педали, умноженной на расстояние от педали до шпинделя кривошипа. Векторная форма этой зависимости:
Скорость педали относительно велосипедиста тогда
Покрутка отключена путем установки Coast свойство к false или путем установки coast аргумент move функция объекта в false.
Этот рисунок показывает местоположение разбрасывателей педалей.
Рассеиватели на верхней и нижней ногах всадника перемещаются с велосипедом с дополнительным циклическим движением. Существует два возможных движения ног в зависимости от того, является ли велосипед покрытием или нет:
Когда велосипед накручивается, ноги не перемещаются относительно велосипеда, и рассеиватели перемещаются со скоростью велосипедиста. Покрутка включена путем установки Coast свойство к true или путем установки coast аргумент move функция объекта в true.
Когда велосипед не накручивается, верхняя и нижняя ноги совершают возвратно-поступательное движение. Верхние ноги частично вращаются вокруг бедра всадника. Ножка крепится к педали и вращается педалью. Колено соединяет нижнюю и верхнюю ноги. Расположения стопы и бедер всадника определяют расположения колен и движение рассеивателей на ногах.
Покрутка отключена путем установки Coast свойство к false или путем установки coast аргумент move функция объекта в false.
Этот рисунок показывает расположение рассеивателей на верхней и нижней ногах гонщика.
Рассеиватели расположены на спицах и ободах колес и вращаются вокруг оси колеса на различных расстояниях, rspk, от оси. Скорость рассеивателей в бициклистской системе координат ссылки составляет
Абсолютная скорость рассеивателя спиц или обода равна
Этот рисунок показывает расположение рассеивателей на колесных ободах и спицах.
[1] Stolz, M. et al. Многоцелевая модель точек отражения велосипедистов для автомобильного радара 2017 European Radar Conference (EURAD), Нюрнберг, 2017, pp. 94-97.
[2] Chen, V., D. Tahmoush, and W. J. Miceli. Радиолокационные микродопплеровские сигнатуры: обработка и применение. Институт инженерии и технологий: Лондон, 2014.
[3] Belgiovane, D., and C. C. Chen. Bicycles and Human Rider Backscattering at 77 GHz for Automotive Radar (неопр.) (недоступная ссылка). 2016 10th Европейская конференция по антеннам и распространению (EuCAP), Давос, 2016, стр. 1-5.
[4] Виктор Чен, The Micro-Doppler Effect in Radar. Norwood, MA: Artech House, 2011.
backscatterPedestrian | getNumScatterers | move | phased.BackscatterRadarTarget | phased.BackscatterSonarTarget | phased.RadarTarget | phased.WidebandBackscatterRadarTarget | plot | reflect
