Постройте графический набор платформ в platform plotter
plotPlatform( определяет положения M платформ, положения которых строятся по platPlotter,positions)platPlotter. Задайте положения как матрицу M -by-3, где каждый столбец матрицы соответствует x -, y - и z - координатам местоположений платформы.
plotPlatform( также задает соответствующие скорости платформ. Скорости строятся как линии вектора, исходящие из положений платформ. Если задано, скорости должны иметь те же размерности, что и положения.platPlotter,positions,velocities)
plotPlatform( также задает вектор длины камеры M элементы которого содержат текстовые метки, соответствующие M платформам, заданным в матрице позиций. Если метки опущены, они не строятся.platPlotter,positions,labels)
plotPlatform( задает скорости и текстовые метки, соответствующие M платформам, заданным в матрице позиций.platPlotter,positions,velocities,labels)
plotPlatform( определяет размерность и ориентацию каждой нанесенной на график платформы.platPlotter,positions,___,dimensions,orientations)
plotPlatform( задает степень каждой платформы, использующей сетки.platPlotter,positions,___,meshes,orientations)
Для использования сеток требуется Sensor Fusion and Tracking Toolbox™.
Создайте театральный график.
tp = theaterPlot('XLim',[0,90],'YLim',[-35,35],'ZLim',[1,10]);
Создайте плоттер платформы с именем 'Platforms'.
plotter = platformPlotter(tp,'DisplayName','Platforms');
Обновите график театра с тремя платформами, маркированными, 'R1', 'R2', и 'R3'. Расположите три платформы, в единицах измерения, на , , и , с соответствующими скоростями (в м/с) , , и , соответственно.
positions = [30, 5, 4; 30, -10, 2; 30, 15, 1];
velocities = [-10, 0, 2; -10, 3, 1; -10, -4, 1];
labels = {'R1','R2','R3'};
plotPlatform(plotter, positions, velocities, labels);
platPlotter - График платформыplatformPlotter объектПлоттер платформы, заданный как platformPlotter объект.
positions - Положения на платформеПозиции платформы, заданные как M -by-3 матрица с реальным значением, где M количество платформ. Каждый столбец матрицы соответствует x -, y - и z - координатам местоположений платформы в метрах.
velocities - Скорости платформыСкорости платформы, заданные как M -by-3 вещественная матрица, где M количество платформ. Каждый столбец матрицы соответствует x, y и z скоростям платформ. Если задано, velocities должны иметь те же размерности, что и positions.
labels - метки платформыМетки платформы, заданные как M-на-1 массив ячеек векторов символов, где M количество платформ. labels содержит текстовые метки, соответствующие M платформам, указанным в positions. Если labels опущен, метки не нанесены.
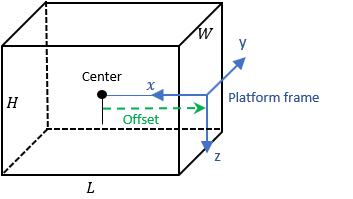
dimensions - размерности платформыРазмерности платформы, заданные как M -by-1 массив размерных структур, где M количество платформ. Полями каждой структуры размерности являются:
Поля Dimensions
| Области | Описание |
|---|---|
Length | Размерность кубоида по x направлению |
Width | Размерность кубоида по y направлению |
Height | Размерность кубоида по z направлению |
OriginOffset | Положение координатной системы координат платформы относительно кубоидного центра, заданное как вектор из трех элементов |
meshes - Сетки платформextendedObjectMesh объектСетки платформы, заданные как M-element массив extendedObjectMesh (Sensor Fusion and Tracking Toolbox) объекты.
orientations - Ориентация платформымассив quaternion объектОриентации платформы, заданные как 3 -by- 3 -by- M массив матриц вращения или M -элемент массив quaternion объекты.
