Чисто дискретная система состоит исключительно из дискретных блоков и может быть смоделирована с помощью либо решателя с фиксированным шагом, либо решателя с переменным шагом. Симуляция дискретной системы требует, чтобы симулятор делал шаг симуляции при каждом шаге расчета. Для многократной дискретной системы - системы, блоки которой Simulink® выборки с различными скоростями - шаги должны происходить с целым числом, кратным каждому из системных шагов расчета. В противном случае симулятор может пропустить ключевые переходы в состояниях системы. Размер шага, который выбирает программное обеспечение Simulink, зависит от типа решателя, который вы используете для симуляции многоразовой системы, и от основного шага расчета.
Основной шаг расчета многоразовой дискретной системы является самым большим двойником, который является целочисленным делителем фактических шагов расчета системы. Например, предположим, что система имеет шаги расчета 0,25 и 0,50 секунд. Основной шаг расчета в этом случае составляет 0,25 секунды. Предположим, вместо этого, шаги расчета составляют 0,50 и 0,75 секунды. Основной шаг расчета снова составляет 0,25 секунд.
Важность основного шага расчета непосредственно связана с тем, направляете ли вы программное обеспечение Simulink на использование дискретного решателя с фиксированным шагом или с переменным шагом, чтобы решить вашу многоразовую дискретную систему. Решатель с фиксированным шагом устанавливает размер шага симуляции равным основному шагу расчета дискретной системы. Напротив, решатель с переменным шагом изменяет размер шага, чтобы равняться расстоянию между фактическими попаданиями шаг расчета.
Следующая схема иллюстрирует различие между решателем с фиксированным шагом и решателем с переменным шагом.
В схеме стрел указывают шаги симуляции, а круги представляют шагу расчета попадания. Как иллюстрирует схема, решатель с переменным шагом требует меньшего количества шагов симуляции, чтобы симулировать систему, если основное время расчета меньше, чем любое из фактических шагов расчета моделируемой системы. С другой стороны, решатель с фиксированным шагом требует меньше памяти для реализации и быстрее, если одно из системных шагов расчета является фундаментальным. Это может быть преимуществом в приложениях, которые влекут за собой генерацию кода из модели Simulink (использование Simulink Coder™). В любом случае дискретный решатель, предоставляемый Simulink, оптимизирован для дискретных систем; однако можно симулировать чисто дискретную систему с любым из решателей и получить эквивалентные результаты.
Рассмотрим следующий пример простой многократной системы. В данном примере DTF1 Discrete Transfer Fcn блок Шаг расчета устанавливается на [1 0.1] [], что дает ему смещение 0.1. Для Шага расчета блока DTF2 Discrete Transfer Fcn задано значение 0.7 , без смещения. Решатель устанавливается на дискретный решатель с переменным шагом.
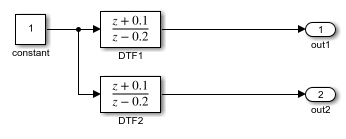
Выполнение симуляции и построение графика выходов с помощью stairs функция
set_param(bdroot,'SolverType','Variable-Step','SolverName','VariableStepDiscrete','SaveFormat','Array');
simOut = sim(bdroot,'Stoptime','3');
stairs(simOut.tout,simOut.yout,'-*','LineWidth',1.2);
xlabel('Time (t)');
ylabel('Outputs (out1,out2)');
legend('t_s = [1, 0.1]','t_s = 0.7','location','best')
создает следующий график.
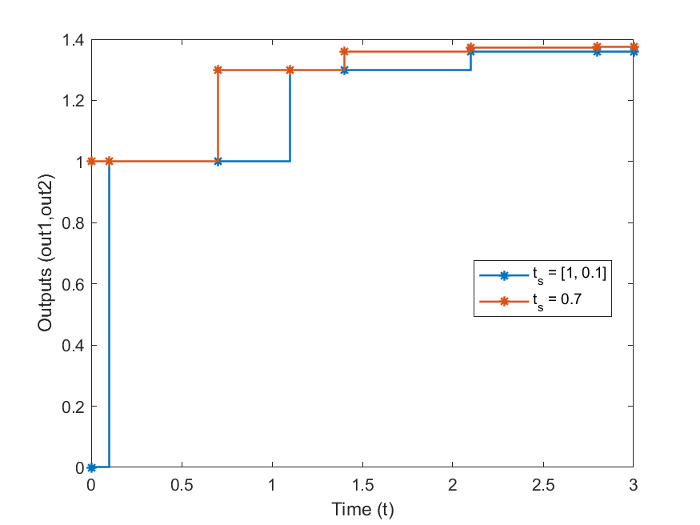
(Для получения информации о sim команда. см. «Запуск симуляций программно».)
Как показано на рисунке, потому что блок DTF1 имеет 0.1 смещение, блок DTF1 не имеет выхода, пока t = 0.1. Точно так же начальные условия передаточных функций равны нулю; поэтому выход DTF1 y (1) равен нулю перед этим временем.
Гибридные системы содержат как дискретные, так и непрерывные блоки и, таким образом, имеют как дискретные, так и непрерывные состояния. Однако решатели Simulink рассматривают любую систему, которая имеет как непрерывные так и дискретные шаги расчета, как гибридную систему. Для получения информации о моделировании гибридных систем смотрите Моделирование гибридных систем.
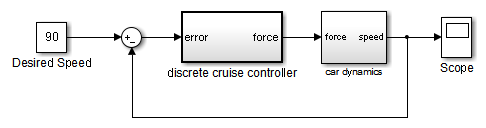
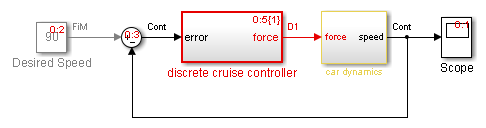
В блоках термин гибрид применяется как к гибридным системам (смешанные непрерывно-дискретные системы), так и к системам с несколькими шагами расчета (мультирейт-системы). Такие системы становятся желтыми в цвете, когда вы выполняете Update Diagram с Colors Sample Time Display 'on'. В качестве примера рассмотрим следующую модель, которая содержит атомарную подсистему «Discrete Cruise Controller» и виртуальную подсистему «Car Dynamics». (См. ex_execution_order.)
Модель автомобиля
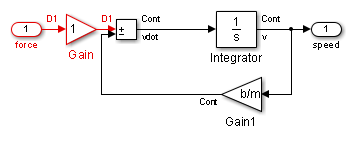
С опцией Sample Time, установленной на All, Update Diagram поворачивает виртуальную подсистему желтым цветом, указывая, что она является гибридной подсистемой. В этом случае подсистема является истинной гибридной системой, поскольку она имеет как непрерывные так и дискретные шаги расчета. Как показано ниже, дискретный входной сигнал D1 объединяется с сигналом непрерывной скорости v, чтобы создать непрерывный вход для интегратора.
Модель автомобиля после схемы обновления
Подсистема динамики автомобиля после схемы обновления
Теперь рассмотрим многоразовую подсистему, которая содержит три Sine Wave исходные блоки, каждая из которых имеет уникальный шаг расчета - 0,2, 0,3 и 0,4 соответственно.
Многоуровневая подсистема после схемы обновления
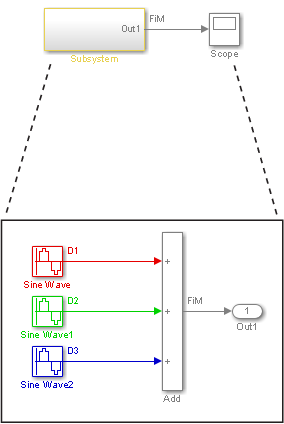
Update Diagram поворачивает подсистему, желтую, потому что подсистема содержит больше чем в один раз. Как показано на блок-схеме, блоки Sine Wave имеют дискретные шаги расчета D1, D2 и D3, и выходной сигнал фиксируется на мелком шаге.
При оценке системы для нескольких шагов расчета Simulink не рассматривает ни постоянные [inf, 0], ни асинхронные [-1, -n] шаги расчета. Таким образом, подсистема, состоящая из одного блока, который выводит постоянное значение, и одного блока с дискретным шагом расчета, не будет обозначена как гибридная.
Гибридная аннотация и раскраска очень полезны для оценки того, унаследовали ли подсистемы в вашей модели правильное или ожидаемые шаги расчета.
Блоки, для которых Шаг расчета не рекомендуется | Просмотр Шага расчета информации
