Можно программно симулировать модель двумя способами:
По sim команда.
С помощью кнопки run
При выполнении симуляций с sim команда используется в командной строке для выполнения операций над симуляцией. Выполнение симуляций с помощью кнопки Run подразумевает, что вы можете взаимодействовать с симуляцией с помощью Simulink® UI для выполнения любых других дополнительных операций. В следующей таблице подробно изложены различия между этими двумя подходами.
| Действия | sim Симуляции команд | Кнопка Run Симуляций |
| Допустимый уровень взаимодействия | Низко | Высоко |
| Запустите симуляцию | sim команда | set_param(mdl,'SimulationCommand','Start') / Run |
| Остановка симуляции | Ctrl-C в командной строке |
|
| Пауза симуляции | Нет | Да. set_param(mdl,'SimulationCommand','Pause') / Pause |
| Подсказка MATLAB доступна во время выполнения симуляции | Нет | Да |
| Возможности обновляются во время выполнения симуляции | Да, кроме Rapid Режима Accelerator | Да |
| Симуляционный шаговый | Нет | Да, кроме модели быстрого ускорителя) |
| Условные паузы | Нет | Да, кроме модели быстрого ускорителя) |
| Значение порта отображается доступным во время выполнения симуляции? | Нет | Да |
| Поддерживает темп симуляции | Да | Да |
Поддерживает TimeOut опция | Да | Нет |
| Обработка ошибок | Исключение MATLAB, если только CaptureErrors включен | Отправлено в Средство Просмотра |
sim Симуляции командМожно программно симулировать модель с sim функция при помощи заданных методов для задания значений параметров. В дополнение к симуляции модели можно использовать sim команда, чтобы включить тайм-аут симуляции, захватить ошибки симуляции и получить доступ к метаданным симуляции, когда ваша симуляция завершена.
Этот пример показывает, как программно симулировать модель, задавая параметры как пары "имя-значение".
Симулируйте vdp модель со значениями параметров, заданными как последовательные пары "имя-значение".
simOut = sim('vdp','SimulationMode','normal','AbsTol','1e-5',... 'SaveState','on','StateSaveName','xout',... 'SaveOutput','on','OutputSaveName','yout',... 'SaveFormat', 'Dataset'); outputs = simOut.get('yout')
outputs =
Simulink.SimulationData.Dataset
Package: Simulink.SimulationData
Characteristics:
Name: 'yout'
Total Elements: 2
Elements:
1 : 'x1'
2 : 'x2'
-Use get or getElement to access elements by index or name.
-Use addElement or setElement to add or modify elements.Моделируете модель в Normal mode, задающий абсолютную погрешность для ошибки решателя. sim функция возвращает SimOut, один Simulink.SimulationOutput объект, который содержит все выходы симуляции: записанное время, состояния и сигналы. sim функция не возвращает значения симуляции в рабочую область.
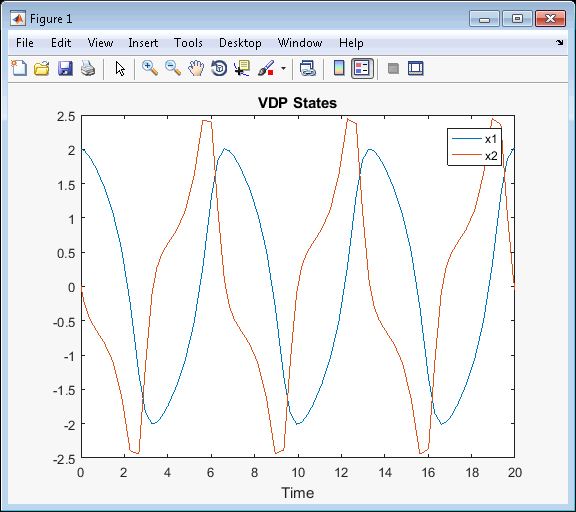
Постройте график выхода значений сигналов со временем.
x1 = (outputs.get('x1').Values); x2 = (outputs.get('x2').Values); plot(x1); hold on; plot(x2); title('VDP States') xlabel('Time'); legend('x1','x2')
Если вы запускаете несколько симуляций в цикле и используете решатель с переменным шагом, рассмотрите использование sim с timeout параметр. Если по каким-то причинам симуляция повиснет или начнет делать неожиданно небольшие временные шаги, она будет тайм-аутом. Затем может быть запущена следующая симуляция.
N = 100; simOut = repmat(Simulink.SimulationOutput, N, 1); for i = 1:N simOut(i) = sim('vdp', 'timeout', 1000); end
Если ошибка приводит к остановке симуляции, можно увидеть ошибку в метаданных симуляции. В этом случае, sim захватывает данные моделирования в выходном объекте симуляции до момента, когда он сталкивается с ошибкой, что позволяет вам выполнить некоторую отладку симуляции, не перезапуская ее. Чтобы включить эту функцию, используйте CaptureErrors параметр с параметром sim функция.
simOut = sim('my_model', 'CaptureErrors', 'on'); simOut.getSimulationMetadata.ExecutionInfo
ans =
struct with fields:
StopEvent: 'DiagnosticError'
StopEventSource: []
StopEventDescription: 'Division by zero in 'my_model/Divide''
ErrorDiagnostic: [1×1 struct]
WarningDiagnostics: [0×1 struct]Другим преимуществом этого подхода является то, что ошибка симуляции также не вызывает sim чтобы остановить. Поэтому, если вы используете sim в for цикл, например, последующие итерации цикла все еще будут запускаться.
В этом примере показано, как получить доступ к метаданным симуляции после завершения симуляции. Можно запустить любой вид симуляции и получить доступ к ее метаданным.
Этот пример моделирует модель со значениями параметров, заданными как пары "имя-значение". Запустите симуляцию.
simOut = sim('vdp','SimulationMode','normal','AbsTol','1e-5',... 'SaveState','on','StateSaveName','xoutNew',... 'SaveOutput','on','OutputSaveName','youtNew',... 'SaveFormat', 'StructureWithTime');
Доступ к ModelInfo свойство, которое имеет базовую информацию о модели и решателе.
simOut.getSimulationMetadata.ModelInfo
ans =
struct with fields:
ModelName: 'vdp'
ModelVersion: '1.6'
ModelFilePath: 'C:\MyWork'
UserID: 'User'
MachineName: 'MyMachine'
Platform: 'PCWIN64'
ModelStructuralChecksum: [4×1 uint32]
SimulationMode: 'normal'
StartTime: 0
StopTime: 20
SolverInfo: [1×1 struct]
SimulinkVersion: [1×1 struct]
LoggingInfo: [1×1 struct]Смотрите информацию о решателе.
simOut.getSimulationMetadata.ModelInfo.SolverInfo
ans =
struct with fields:
Type: 'Variable-Step'
Solver: 'ode45'
MaxStepSize: 0.4000Проверьте время выполнения для моделирования, например, когда ваша симуляция началась и завершена, и время, необходимое для инициализации, выполнения и завершения симуляции.
simOut.getSimulationMetadata.TimingInfo
ans =
struct with fields:
WallClockTimestampStart: '2016-06-17 10:26:58.433686'
WallClockTimestampStop: '2016-06-17 10:26:58.620687'
InitializationElapsedWallTime: 0.1830
ExecutionElapsedWallTime: 1.0000e-03
TerminationElapsedWallTime: 0.0030
TotalElapsedWallTime: 0.1870Добавьте заметки к симуляции.
simOut=simOut.setUserString('Results from simulation 1 of 10');
simOut.getSimulationMetadataans =
SimulationMetadata with properties:
ModelInfo: [1×1 struct]
TimingInfo: [1×1 struct]
ExecutionInfo: [1×1 struct]
UserString: 'Results from simulation 1 of 10'
UserData: []Вы также можете добавить свои собственные пользовательские данные с помощью UserData свойство.
Для интерактивной симуляции можно использовать set_param и get_param. С set_param и get_paramможно проверить состояние выполняемой симуляции и управлять работой симуляции с помощью коллбэков блоков.
В этом примере показано, как использовать set_param для управления и проверки состояния симуляции. set_param позволяет динамически обновлять переменные, а также записывать переменные регистрации данных в рабочую область.
Запустите симуляцию.
set_param('vdp','SimulationCommand','start')
Когда вы запускаете симуляцию, используя set_param и 'start' аргумент, вы должны использовать 'stop' аргумент, чтобы остановить его. Не используйте 'stop' аргумент заставляет симуляцию останавливаться только после ее завершения.
Пауза, продолжение и остановка симуляции.
set_param('vdp','SimulationCommand','pause') set_param('vdp','SimulationCommand','continue') set_param('vdp','SimulationCommand','stop')
Когда вы используете set_param чтобы приостановить или остановить симуляцию, симуляция не выполняет команды сразу. Вы можете использовать set_param чтобы запустить симуляцию после stop и продолжить симуляцию после команды паузы. Simulink сначала завершает бесперебойную работу, такую как шаги решателя и другие команды, которые предшествовали set_param команда. Затем симуляция запускается, паузы, продолжение или остановка, как задано в set_param команда.
Проверьте состояние симуляции.
get_param('vdp','SimulationStatus')
Программное обеспечение возвращается 'stopped', 'initializing', 'running', 'paused', 'compiled', 'updating', 'terminating', или 'external' (используется с продуктом Simulink Coder™).
Чтобы динамически обновлять измененные переменные рабочей области во время работы симуляции, используйте update команда.
set_param('vdp','SimulationCommand','update')
Запись всех переменных регистрации данных в базовое рабочее пространство.
set_param('vdp','SimulationCommand','WriteDataLogs')
Коллбэк выполняется, когда вы выполняете различные действия на модели, такие как запуск, пауза или остановка симуляции. Можно использовать коллбэки для выполнения MATLAB® скрипт или другие команды MATLAB. Для получения дополнительной информации см. Коллбэки» для настроенных параметров поведения модели и обратного коллбэка блоков.
В этом примере показано, как использовать модель StartFcn коллбэк для автоматического выполнения кода MATLAB перед началом симуляции.
Напишите скрипт MATLAB, который находит Scope блоки в вашей модели и открывает их на переднем плане, когда вы симулируете модель. Сохраните скрипт в текущей папке.
% openscopes.m % Brings scopes to forefront at beginning of simulation. blocks = find_system(bdroot,'BlockType','Scope'); % Finds all of the scope blocks in the top level of your % model. To find scopes in subsystems, provide the subsystem % names. Type help find_system for more on this command. for i = 1:length(blocks) set_param(blocks{i},'Open','on') end % Loops through all of the scope blocks and brings them % to the forefront.
Установите StartFcn параметр для вызова моделью openscopes скрипт.
set_param('my_model','StartFcn','openscopes')
getSimulationMetadata | setUserData | setUserString | Simulink.SimulationMetadata | Simulink.SimulationOutput
