Frequency Response Based PID Tuner моделирует модель, чтобы оценить частотные характеристики объекта на нескольких частотах около полосы пропускания управления. Затем он использует предполагаемую частотную характеристику, чтобы настроить усиления в вашем PID Controller. Этот тюнер является полезной альтернативой, когда PID Tuner не можете линеаризировать объект в рабочей точке, которую вы хотите использовать для настройки.
Frequency Response Based PID Tuner можете настроить параметры P, I, D и N в PID Controller и PID Controller (2DOF) блоках как за непрерывное время, так и за дискретное время. Для PID Controller (2DOF) блоков тюнер не настраивает веса b и c уставки.
Как и интерактивный PID Tuner, Frequency Response Based PID Tuner рассматривает объект как все блоки в цикле между выходом блока PID Controller и входом. Frequency Response Based PID Tuner выполняет эксперимент по возмущению, чтобы оценить частотную характеристику разомкнутого контура объекта. Для этого тюнер выполняет следующие шаги:
Разрывает цикл обратной связи на контроллер выходе и моделирует модель, применяя сигналы возмущения к объекту. Возмущения включают синусоидальные сигналы на частотах [1/3,1,3,10] ωc , где ωc - целевая полоса пропускания, которую вы задаете для настройки. Если объект асимптотически стабилен, приложенный сигнал также включает в себя шаговое возмущение.
Измеряет ответ на возмущение на входе контроллера.
Использует полученные данные, чтобы оценить частотную характеристику объекта на четырех частотах. Для асимптотически стабильных объектов тюнер также использует ответ на ступенчатое возмущение для оценки усиления постоянного тока объекта.
Использует предполагаемую частотную характеристику для вычисления коэффициентов ПИД, которые балансируют эффективность и робастность.
Если ваша модель включает нарушения порядка, тюнер может запустить две симуляции: симуляцию без возмущения, чтобы получить базовую характеристику и симуляцию с возмущениями, примененными к объекту. Затем тюнер использует различие между двумя реакциями, чтобы удалить эффекты нарушений порядка в модели. В этом случае оценочная частотная характеристика, используемая для настройки, основана на этой безаварийной характеристике.
Чтобы открыть Frequency Response Based PID Tuner, в диалоговом окне PID Controller блока, в раскрывающемся списке Select Tuning Method, выберите Frequency Response Based.
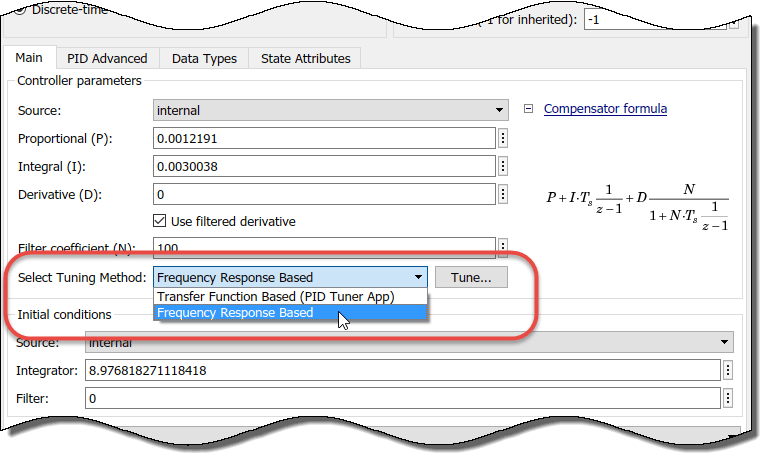
Нажмите Tune. Откроется Frequency Response Based PID Tuner. Тюнер считывает некоторые параметры из блока PID Controller. Эти параметры включают:
Тип контроллера (такой как PI, PD или PID)
Форма контроллера (параллельная или идеальная)
Временной интервал контроллера (непрерывное время или дискретное время)
Устройство управления шага расчета
В Frequency Response Based PID Tuner Вы конфигурируете настройки для эксперимента по оценке и целей настройки.
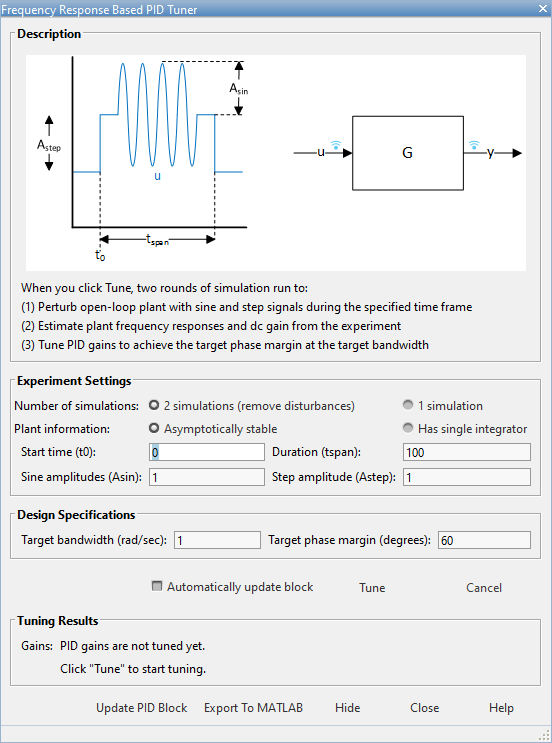
В разделе Experiment Settings вы задаете параметры, которые управляют экспериментом по оценке частотной характеристики. Для получения дополнительной информации об этих настройках нажмите кнопку Help.
Задайте, запускать ли две симуляции (по умолчанию) или одну. Если ваша модель включает нарушения порядка, которые могут повлиять на результат эксперимента по оценке частотной характеристики, выберите 2 simulations (remove disturbances). При выборе этой опции тюнер запускает симуляцию базовой линии и вычитает полученную частотную характеристику из возмущенной симуляции, чтобы удалить эффекты нарушений порядка. Если ваша модель не содержит таких нарушений порядка, пропустите симуляцию базовой линии, выбрав 1 simulation.
Укажите, является ли объект асимптотически стабильным или имеет одного интегратора. Если объект асимптотически стабилен, оценочный эксперимент включает оценку усиления постоянного тока объекта. Эта оценка выполняется Frequency Response Based PID Tuner путем ввода в объект сигнала шага.
Внимание
Не используйте Frequency Response Based PID Tuner с нестабильного объекта или объекта, содержащей несколько интеграторов.
Укажите время начала эксперимента в поле Start time (t0). Начните эксперимент, когда объект находится в желаемой рабочей точке равновесия. Например, если вы знаете, что ваша симуляция должна пройти до 10 с, чтобы объект достиг такой рабочей точки, задайте время запуска 10.
Задайте длительность эксперимента в поле Duration (tspan). Пусть эксперимент проходит достаточно долго, чтобы алгоритм оценки частотной характеристики собрал достаточные данные для хорошей оценки на всех частотах, которые он зондирует. Консервативная оценка длительности эксперимента составляет 100/ ωc, где ωc - целевая полоса пропускания для настройки, которую вы задаете.
Задайте амплитуды возмущения. Во время эксперимента по настройке Frequency Response Based PID Tuner вводит синусоидальный сигнал в объект на четырех частотах, [1/3,1,3,10] ωc . Используйте поле Sine amplitudes (Asin), чтобы задать амплитуды этих введенных сигналов. Можно задать скалярное значение, чтобы ввести ту же амплитуду на каждой частоте, или вектор длины 4, чтобы задать различные амплитуды для каждой.
В типичном объекте с типичной целевой полосой пропускания величины характеристик объекта на частотах эксперимента не изменяются в широких пределах. В таких случаях можно использовать скалярное значение, чтобы применить одно и то же возмущение величины на всех частотах. Однако, если вы знаете, что реакция резко затухает в частотной области значений, рассмотрите уменьшение амплитуды входов более низкой частоты и увеличение амплитуды входов более высокой частоты. Численно лучше для оценочного эксперимента, когда все реакции объектов имеют сопоставимые величины.
Амплитуды возмущения должны быть:
Достаточно большое, что возмущение преодолевает любой тупик в приводе объекта и генерирует ответ выше уровня шума
Достаточно маленькая, чтобы сохранить работу объекта в пределах приблизительно линейной области около номинальной рабочей точки и избежать насыщения входного или выходного сигнала объекта
В эксперименте синусоидальные сигналы накладываются (с ступенчатым возмущением, если таковое имеется, в случае разомкнутой настройки). Таким образом, возмущение может быть, по меньшей мере, таким же большим, как и сумма всех амплитуд. Поэтому, чтобы получить соответствующие значения для амплитуд, рассмотрите:
Пределы привода. Убедитесь, что самое большое возмущение находится в области значений вашего объекта привода. Насыщение привода может внести ошибки в расчетную частотную характеристику.
Насколько изменяется реакция объекта в ответ на заданный вход привода в номинальной рабочей точке для настройки. Для образца предположим, что вы настраиваете ПИД-регулятор, используемую в скорость вращения двигателя управлении. Вы определили, что на частотах вокруг целевой полосы пропускания изменение угла дросселя на 1 ° вызывает изменение скорости вращения двигателя приблизительно на 200 об/мин. Предположим далее, что для сохранения линейной эффективности скорость не должна отклоняться более чем на 100 об/мин от номинальной рабочей точки. В этом случае выберите амплитуду, чтобы убедиться, что сигнал возмущения не больше 0,5 (принимая, что значение находится в пределах пределов привода ).
Если ваш объект асимптотически стабилен, задайте амплитуду шагового возмущения в Step amplitudes (Astep) поле. Факторы для выбора амплитуды шага те же, что факторы для определения амплитуд шага.
В Design Specifications разделе диалогового окна задаются цели настройки ПИД.
Задайте целевую полосу пропускания в поле Target bandwidth (rad/sec). Целевая полоса пропускания является целевым значением для 0-dB частота среза усиления настроенного разомкнутого контура отклика CP где P - реакция объекта управления, а C - реакция контроллера. Эта частота среза примерно устанавливает пропускную способность управления. Для желаемого времени нарастания τ хорошее предположение для целевой полосы 2/ τ.
В поле Target phase margin (degrees) задайте целевой минимальный запас по фазе для настроенного отклика разомкнутого контура в частоту среза. Целевой запас по фазе отражает желаемую робастность настроенной системы. Обычно выбирают значение в области значений около 45-60 °. В целом более высокий запас по фазе улучшает перерегулирование, но может ограничить скорость отклика. Значение по умолчанию, 60 °, имеет тенденцию балансировать эффективность и робастность, давая около 5-10% перерегулирования, в зависимости от характеристик вашего объекта.
Для получения дополнительной информации об этих настройках нажмите кнопку Help.
Щелкните Tune, чтобы начать эксперимент по оценке частотной характеристики. Пока идет эксперимент по оценке, тюнер:
Закрывает открытый PID Controller блок.
Удаление результатов предыдущей настройки, отображаемых в диалоговом окне тюнера.
Заменяет блок PID Controller в модели неназванной подсистемой.
Примечание
Когда эксперимент по оценке завершен или отменен, тюнер восстанавливает блок PID Controller. Этот процесс может привести к некоторому перемещению сигнальных проводов на холсте модели и помещает ваш Simulink® модель в состоянии с несохраненными изменениями.
Когда эксперимент по оценке заканчивается, тюнер вычисляет новые коэффициенты ПИД и отображает их в Tuning Results разделе диалогового окна. (Для получения дополнительной информации о результатах настройки нажмите Help.)
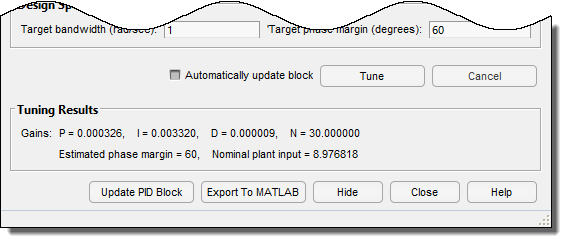
Если выбран Automatically update block, Frequency Response Based PID Tuner запишет новые коэффициенты ПИД в блок PID Controller по завершении настройки. В противном случае щелкните Update PID Block, чтобы записать настроенные усиления в блок. Симулируйте модель, чтобы подтвердить настроенные усиления относительно вашей полной нелинейной системы.
Для примера, иллюстрирующего использование Frequency Response Based PID Tuner для настройки блока PID Controller в модели Simulink, которая не линеаризируется, смотрите Проект ПИД-регулятора Использование частотной характеристики объекта вблизи полосы пропускания.
