Этот пример показов, как утверждать, что ограничения на линейную систему характеристики нелинейного Simulink® модель, вычисленная во времени моментального снимка симуляции по умолчанию 0, выполняется во время симуляции.
Откройте нелинейную модель Simulink. Для примера:
watertank
Откройте браузер библиотеки Simulink. В редакторе Simulink, на вкладке Simulation, нажмите Library Browser.
Добавьте блок верификации модели в модель Simulink.
В библиотеке Simulink Control Design выберите Model Verification.
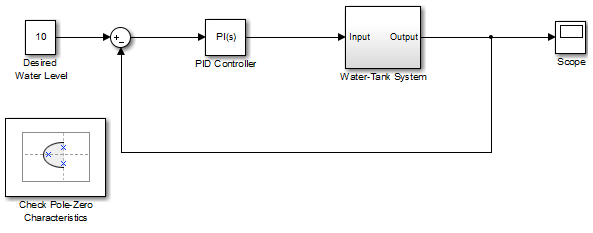
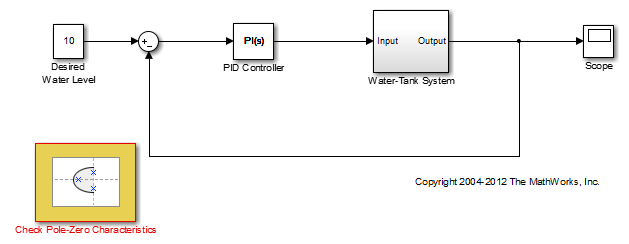
Перетащите блок, например, блок Check Pole-Zero Characteristics, в Редактор Simulink.
Теперь модель напоминает следующий рисунок.
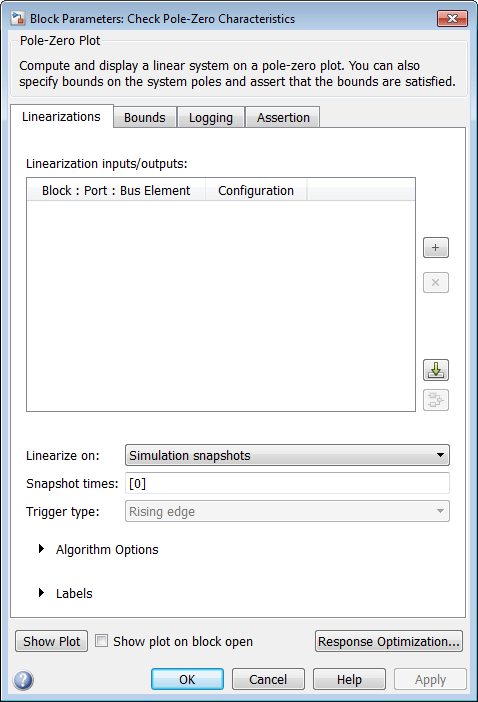
Дважды кликните блок, чтобы открыть диалоговое окно Параметров блоков.
Дополнительные сведения о параметрах блоков см. на страницах с описанием блоков.
Укажите вход и выход линеаризации, чтобы вычислить полюса и нули замкнутой системы.
Совет
Если вы определили входные и выходные входы линеаризации в модели Simulink, щелкните![]() , чтобы автоматически заполнить таблицу Linearization inputs/outputs I/Os из модели.
, чтобы автоматически заполнить таблицу Linearization inputs/outputs I/Os из модели.
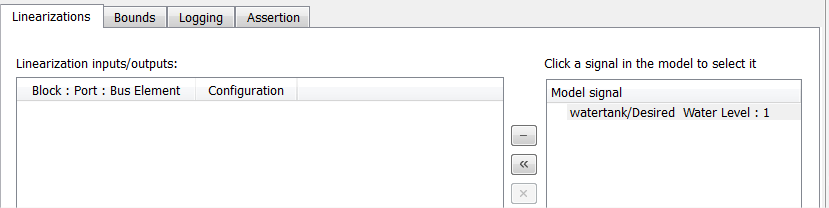
Чтобы задать вход:
Щелкните![]() рядом с таблицей Linearization inputs/outputs.
рядом с таблицей Linearization inputs/outputs.
Диалоговое окно Параметров блоков развернется для отображения области Click a signal in the model to select it.
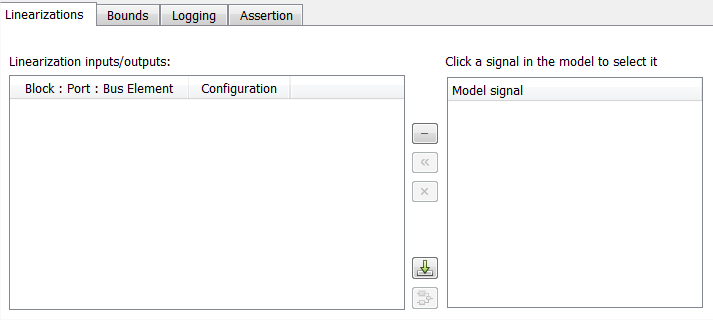
В модели Simulink щелкните выходной сигнал Desired Water Level блок, чтобы выбрать его.
Область Click a signal in the model to select it обновляется, чтобы отобразить выбранный сигнал.
Совет
Можно выбрать несколько сигналов сразу в модели Simulink. Все выбранные сигналы появляются в области Click a signal in the model to select it.
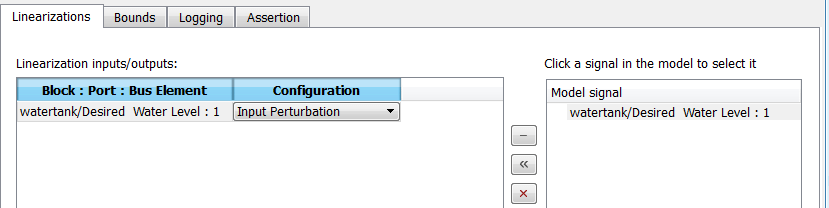
Щелкните![]() , чтобы добавить сигнал к таблице Linearization inputs/outputs.
, чтобы добавить сигнал к таблице Linearization inputs/outputs.
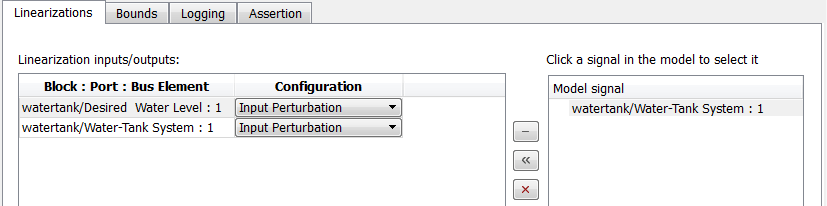
Чтобы задать выход:
В модели Simulink щелкните выходной сигнал Water-Tank System блок, чтобы выбрать его.
Область Click a signal in the model to select it обновляется, чтобы отобразить выбранный сигнал.

Щелкните![]() , чтобы добавить сигнал к таблице Linearization inputs/outputs.
, чтобы добавить сигнал к таблице Linearization inputs/outputs.
Примечание
Чтобы найти местоположение в модели Simulink, соответствующее сигналу в таблице Linearization inputs/outputs, выберите сигнал в таблице и нажмите.![]()
В раскрывающемся списке Configuration таблицы Linearization inputs/outputs выберите Output Measurement для watertank/Water-Tank System: 1.

Примечание
I/Os включают цикл обратной связи в модель Simulink. Программа вычисляет полюса и нули системы с обратной связью.
Щелкните![]() , чтобы свернуть область Click a signal in the model to select it.
, чтобы свернуть область Click a signal in the model to select it.
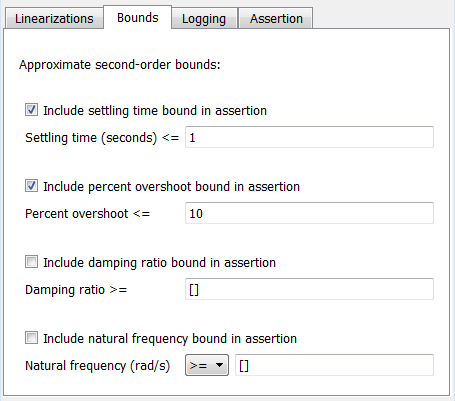
Задайте границы для значения. В этом примере вы используете аппроксимацию границ второго порядка по умолчанию, заданную Bounds вкладке диалогового окна Параметров блоков.
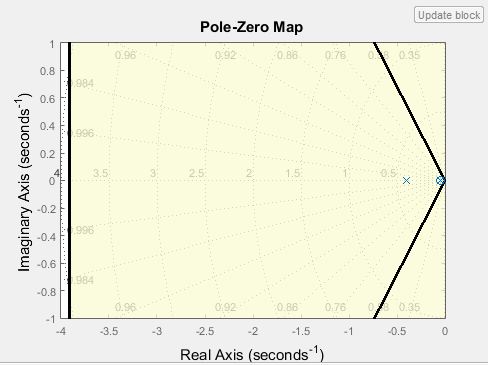
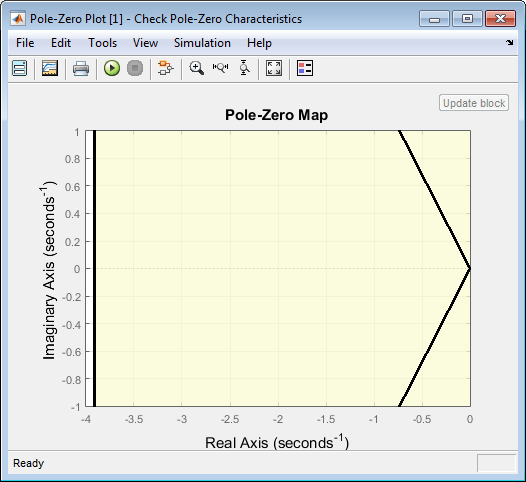
Просмотрите границы карты с нулем полюса нажав Show Plot, чтобы открыть окно plot.
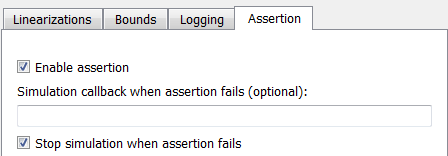
Остановите симуляцию, если установка не удалась, выбрав Stop simulation when assertion fails на вкладке Assertion.
Щелкните Apply, чтобы применить все измененные настройки к блоку.
Симулируйте модель, нажав![]() в окне plot.
в окне plot.
Также можно моделировать модель из редактора Simulink.
Программа линеаризирует фрагмент модели между входом линеаризации и выходом во времени симуляции по умолчанию 0, заданным в Snapshot times параметрах блоков. Когда программа обнаруживает, что шест нарушает заданную границу, симуляция останавливается. Откроется Средство Просмотра, в котором появится сообщение об утверждающем блоке.
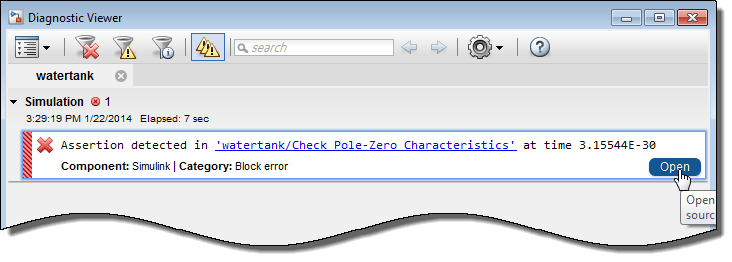
Щелкните Open, чтобы подсветить блок, который утверждается в модели Simulink.
Полюс с обратной связью и нулевые положения вычисленной линейной системы появляются следующим x и o маркировка в окне графика. Вы также можете просмотреть связанное нарушение на графике.