Установите минимальный стандарт для отклонения нарушений порядка шага, при использовании Control System Tuner.
Используйте Step Rejection Goal, чтобы задать, как нарушение порядка шага, введенное в заданном местоположении в вашей системе управления, влияет на сигнал в заданном выходном местоположении.
Можно задать желаемый ответ в терминах пика значения, времени урегулирования и коэффициента затухания во временной области. Control System Tuner пытается сделать фактическое отклонение, по меньшей мере, таким же хорошим, как и желаемый ответ. В качестве альтернативы можно задать ответ как стабильный образец модели, имеющую коэффициент усиления постоянного тока. В этом случае цель настройки состоит в том, чтобы отклонить нарушение порядка, а также или лучше, чем образец модели.
Чтобы задать подавление помех в терминах профиля ослабления частотного диапазона, используйте Disturbance Rejection Goal.
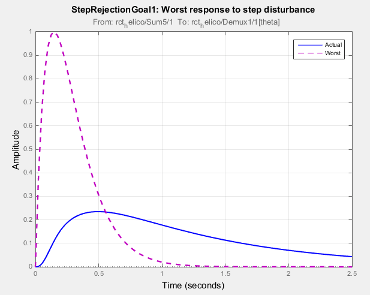
Когда вы создаете цель настройки в Control System Tuner, генерируется график цели настройки. Пунктирная линия показывает целевую переходную характеристику, которую вы задаете. Сплошная линия является текущей соответствующей характеристикой вашей системы.
На вкладке Tuning Control System Tuner выберите New Goal > Rejection of step disturbance, чтобы создать цель отклонения шага.
При настройке систем управления в командной строке используйте TuningGoal.StepRejection для задания переходной характеристики цели.
Используйте этот раздел диалогового окна, чтобы задать входы, вывода и открытия цикла для оценки цели настройки.
Specify step disturbance inputs
Выберите одно или несколько местоположений сигналов в модели, в которых можно применить вход. Чтобы ограничить ответ SISO, выберите однозначный входной сигнал. Для примера ограничьте ответ шагового возмущения из местоположения с именем 'u' в местоположение с именем 'y', нажмите![]() Add signal to list и выберите 'u'
Add signal to list и выберите 'u'. Чтобы ограничить ответ MIMO, выберите несколько сигналов или векторный сигнал.
Specify step response outputs
Выберите в модели одно или несколько местоположений сигнала, в которых можно измерить ответ на нарушение порядка шага. Чтобы ограничить ответ SISO, выберите однозначный выходной сигнал. Например, чтобы ограничить переходный процесс из местоположения с именем 'u' в местоположение с именем 'y', нажмите![]() Add signal to list и выберите 'y'
Add signal to list и выберите 'y'. Чтобы ограничить ответ MIMO, выберите несколько сигналов или векторный сигнал. Для систем MIMO количество выходов должно равняться количеству входов.
Compute the response with the following loops open
Выберите в модели одно или несколько местоположений сигнала, в которых можно открыть цикл обратной связи для оценки этой цели настройки. Цель настройки оценивается относительно строения разомкнутого контура, созданной открытием циклов обратной связи в идентифицируемых вами местах. Например, чтобы вычислить цель настройки с открытием в местоположении с именем 'x', нажмите![]() Add signal to list и выберите 'x'
Add signal to list и выберите 'x'.
Совет
Чтобы выделить любой выбранный сигнал в Simulink® модель, click. ![]() Чтобы удалить сигнал из входного или выходного списка, нажмите.
Чтобы удалить сигнал из входного или выходного списка, нажмите. ![]() Когда вы выбрали несколько сигналов, можно переупорядочить их, используя
Когда вы выбрали несколько сигналов, можно переупорядочить их, используя![]() и.
и. ![]() Для получения дополнительной информации о том, как задать местоположения сигналов для цели настройки, смотрите Задать цели для интерактивной настройки.
Для получения дополнительной информации о том, как задать местоположения сигналов для цели настройки, смотрите Задать цели для интерактивной настройки.
Используйте этот раздел диалогового окна, чтобы задать форму требуемой реакции на нарушение порядка шага. Control System Tuner пытается сделать фактический ответ, по меньшей мере, таким же хорошим, как и желаемый ответ.
Response Characteristics
Задайте желаемый ответ с точки зрения характеристик временной области. Введите максимальную амплитуду, максимальное время урегулирования и минимальную константу демпфирования в текстовых полях.
Reference Model
Укажите требуемый ответ в терминах образца модели.
Введите имя образца модели в MATLAB® рабочая область в Reference Model текстовом поле. Кроме того, введите команду для создания подходящего образца модели, такой как tf([1 0],[1 1.414 1]).
Образец модели должна быть стабильной и должна иметь нулевой коэффициент усиления постоянного тока. Модель может быть непрерывной или дискретной. Если модель дискретна, она может включать задержки, которые обрабатываются как полюсы в z = 0.
Для наилучших результатов эталонная модель и разомкнутая циклическая характеристика от возмущения до результата должны иметь одинаковые усиления на частоте, где эталонная модель достигает пиков усиления.
Этот раздел диалогового окна используется для определения дополнительных характеристик цели отклонения шага.
Adjust for amplitude of input signals и Adjust for amplitude of output signals
Для цели настройки MIMO, когда выбор модулей приводит к смешению малых и больших сигналов в разных каналах отклика, эта опция позволяет вам задать относительную амплитуду каждого входа в векторно значимых сигналах. Эта информация используется для масштабирования недиагональных членов в передаточной функции от входов цели настройки до выходов. Это масштабирование гарантирует, что поперечные связи измеряются относительно амплитуды каждого опорного сигнала.
Когда для этих опций задано значение Noограничиваемая передаточная функция с обратной связью не масштабируется для относительных амплитуд сигнала. Когда выбор модулей приводит к смешению малых и больших сигналов, использование немасштабированной передаточной функции может привести к плохим результатам настройки. Установите значение опции Yes для обеспечения относительных амплитуд входных и выходных сигналов вашей передаточной функции.
Например, предположим, что цель настройки ограничивает передаточную функцию с 2 входами, 2 выходами. Предположим далее, что второй входной сигнал передаточной функции имеет тенденцию быть примерно в 100 раз больше, чем первый сигнал. В этом случае выберите Yes и вводите [1,100] в Amplitudes of input signals текстовом поле.
Амплитуда сигнала регулировки заставляет цель настройки оцениваться на масштабированной передаточной функции Do–1T (s) Di, где T (s) является немасштабированной передаточной функцией. Do и Di являются диагональными матрицами с Amplitudes of output signals и Amplitudes of input signals значениями на диагонали, соответственно.
Значение по умолчанию, No, означает, что масштабирование не применяется.
Apply goal to
Используйте эту опцию при настройке нескольких моделей сразу, таких как массив моделей, полученных путем линеаризации модели Simulink в различных рабочих точках или значениях параметров блоков. По умолчанию активные цели настройки применяются для всех моделей. Чтобы применить требование настройки для подмножества моделей в массиве, выберите Only Models. Затем введите индексы массива моделей, для которых применяется цель. Например, предположим, что вы хотите применить цель настройки ко второй, третьей и четвертой моделям в массиве моделей. Чтобы ограничить применение требования, введите 2:4 в Only Models текстовом поле.
Для получения дополнительной информации о настройке для нескольких моделей см. «Робастные подходы к настройке» (Robust Control Toolbox).
Когда вы настраиваете систему управления, программное обеспечение преобразует каждую цель настройки в нормализованное скалярное значение f (x). Здесь x является вектором свободных (настраиваемых) параметров в системе управления. Затем программа настраивает значения параметров так, чтобы минимизировать f (x) или f (x) ниже 1, если требование настройки является жестким ограничением.
Step Rejection Goal направлено на то, чтобы сохранить коэффициент усиления от нарушения порядка до вывода ниже коэффициента усиления образца модели. Скалярное значение f требования (x) определяется:
или его эквивалент в дискретном времени. Здесь Tdy (s, x) является передаточной функцией с обратной связью ограниченного отклика, и обозначает H ∞ норму (см norm). WF является функцией взвешивания частот, полученной из профиля отклонения шага, заданного в цели настройки. Усиление WF примерно совпадает с обратным значением образца модели для значений усиления в пределах 60 дБ от пикового усиления. По численным причинам весовая функция выравнивается вне этой области значений, если вы не задаете образец модели, которая изменяет наклон вне этой области значений. Эта корректировка называется regularization. Потому что полюса WF близки к s = 0 или s = Inf может привести к плохому числовому обусловлению для настройки, не рекомендуется задавать образцы модели с очень низкочастотной или очень высокочастотной динамикой. Для получения дополнительной информации о регуляризации и ее эффектах смотрите Визуализация целей настройки.
Эта цель настройки также накладывает неявное ограничение устойчивости на передаточную функцию с обратной связью между заданными входами и выходами, оцениваемыми с циклами, открытыми в заданных местах открытия цикла. Динамика, на которую влияет это неявное ограничение, является stabilized dynamics для этой цели настройки. Опции Minimum decay rate и Maximum natural frequency настройки управляют нижней и верхней границами на этих неявно ограниченной динамике. Если оптимизация не соответствует границам по умолчанию или если границы по умолчанию конфликтуют с другими требованиями, на вкладке Tuning используйте Tuning Options, чтобы изменить значения по умолчанию.
