После создания Simulink® модель, можно ввести параметры конфигурации для модели. Эти параметры управляют многими свойствами модели для симуляции и генерации кода.
Конфигурация модели является именованным множеством значений для параметров модели, таких как тип решателя и время начала симуляции или остановки. Каждая модель Simulink создается с конфигурацией модели по умолчанию, называемым Configuration, который первоначально задает значения по умолчанию для параметров модели. Затем можно создать дополнительные конфигурации модели и связать их с моделью. Для получения дополнительной информации о строении Simulink см. Раздел «Управление Конфигураций модели для модели».
Самый легкий способ задать параметры конфигурации для модели Simulink Desktop Real-Time™ - программно назначить конфигурацию модели Simulink Desktop Real-Time по умолчанию, как описано в разделе «Задать конфигурацию модели по умолчанию». Можно также задать параметры вручную, как описано в разделе Ввод параметров конфигурации вручную.
После создания модели Simulink можно использовать sldrtconfigset функция для задания Simulink Desktop Real-Time конфигурации модели по умолчанию для модели. Обычно, используя sldrtconfigset предоставляет значения параметров конфигурации, которые требуются модели.
Следующая процедура использует модель sldrtex_model. Чтобы открыть эту модель, в Командном Окне MATLAB, введите:
open_system(docpath(fullfile(docroot,'toolbox',... 'sldrt','examples','sldrtex_model')))
Это предполагает, что вы уже загрузили эту модель (см. Создание модели Simulink).
Если модель еще не сохранена, на вкладке Simulation нажмите Save > Save as. В File name текстовом поле введите имя файла для модели Simulink и нажмите Save. Для примера введите:
sldrtex_model
Программное обеспечение Simulink сохраняет вашу модель в файле sldrtex_model.
В MATLAB® Командное окно, введите:
sldrtconfigset('sldrtex_model')
Значение по умолчанию Simulink Desktop Real-Time конфигурации модели, SimulinkDesktopRealTime, теперь активно для sldrtex_model модель.
Сохраните модель.
Описание создания приложения Simulink Desktop Real-Time см. в разделе «Создание приложения реального времени».
Чтобы вернуться к конфигурации модели по умолчанию, строение или другой конфигурации модели, имеющемуся у вас в модели, используйте Model Explorer. Описание использования Model Explorer см. в документации Simulink.
Ваша модель использует конфигурацию модели Simulink Desktop Real-Time, когда вы меняете значение System target file на значение Simulink Desktop Real-Time, такое как sldrt.tlc или sldrtert.tlc. Программа создает конфигурацию модели Simulink Desktop Real-Time только в том случае, если он не существует.
Параметры конфигурации дают информацию программному обеспечению Simulink для выполнения симуляции.
Эта процедура использует модель sldrtex_model. Чтобы открыть эту модель, в Командном Окне MATLAB, введите:
open_system(docpath(fullfile(docroot,'toolbox',... 'sldrt','examples','sldrtex_model')))
Это предполагает, что вы уже загрузили эту модель.
На вкладке Desktop Real-Time нажмите Hardware Settings. В диалоговом окне Параметры конфигурации перейдите на вкладку Solver.
В Start time поле введите 0.0. В поле Stop time введите количество времени, которое вы хотите запустить модель. Для примера введите 10.0 секунд.
Из списка Type выберите Fixed-step. Simulink Coder™ не поддерживает переменные решатели шага.
Из списка Solver выберите решатель. Например, выберите решатель общего назначения ode5 (Dormand-Prince).
В разделе Additional options в поле Fixed step size введите значение шага расчета. Для примера введите 0.001 секунд для частоты дискретизации 1000 образцов/секунду.
Оставьте параметр Treat each discrete rate as a separate task очищенным. (Для моделей с блоками, которые имеют разные шаги расчета, выберите этот параметр.)
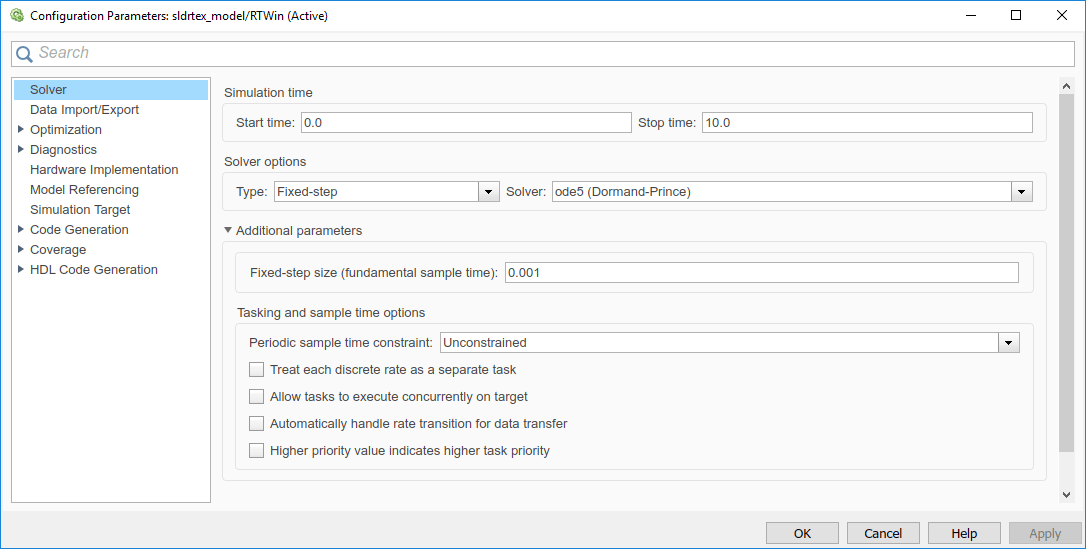
Нажмите OK.
Вы вводите или изменяете параметры возможностей, чтобы задать ось X и ось Y в окне Scope. Другие свойства включают количество графиков в одном окне Scope и шаг расчета для моделей с дискретными блоками.
После добавления блока Scope к модели Simulink можно ввести параметры возможностей для трассировки сигнала:
В редакторе Simulink дважды кликните блок Scope.
На панели инструментов нажмите кнопку Parameters .![]()
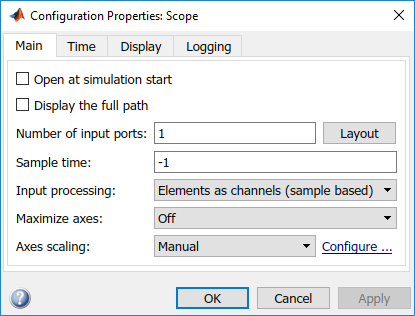
Перейдите на вкладку Main. В Sample time текстовом поле введите -1, что указывает, что этот блок наследует свое значение от своей родительской модели. Если в модели есть дискретные блоки, введите Fixed step size значение, которое вы ввели в диалоговом окне Параметры конфигурации.
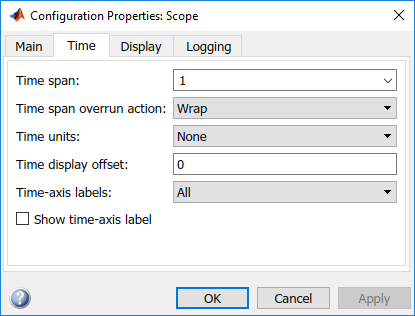
Перейдите на вкладку Time. В Time span поле введите 1.
Перейдите на вкладку Display. В Y-min и Y-max текстовых полях введите область значений для оси Y в окне Scope. Для примера введите -2 и 2.
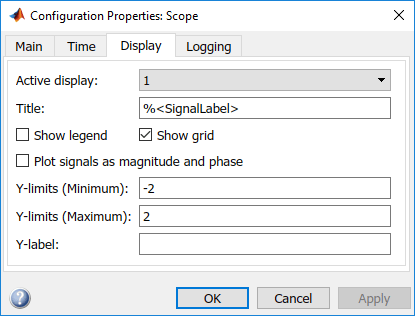
Нажмите OK.
