Линейная или планетарная активная дифференциальная передача
Динамика автомобиля Blockset/Powertrain/Drivetrain/Final Drive Unit
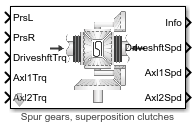
Блок Active Differential реализует активный дифференциал, чтобы принять во внимание передачу степени от передачи к осям. Блок моделирует активный дифференциал как открытый дифференциал, соединенный либо с ветряным, либо с планетарным дифференциальным набором передач. Блок использует внешние сигналы давления, чтобы регулировать давление в муфте, чтобы ускорить или замедлить каждое вращение оси.
Используйте блок в оборудование - в контуре (HIL) и рабочие процессы оптимизации, чтобы динамически связать вал с осями колеса, когда вы хотите направить крутящий момент трансмиссии к определенной оси. Для детальных исследований привода передних колес используйте блок для соединения приводного вала с универсальными шарнирами. Блок подходит для использования в уровень системы исследованиях управления с обратной связью, для примера, устойчивости рыскания и векторизации крутящего момента. Все параметры настраиваются .
Чтобы задать активный дифференциал, откройте параметры Active Differential и задайте Active differential type.
Настройка | Реализация блока |
|---|---|
Spur gears, superposition clutches | Муфты находятся в суперпозиции через систему с тремя шестернями и дифференциальный корпус |
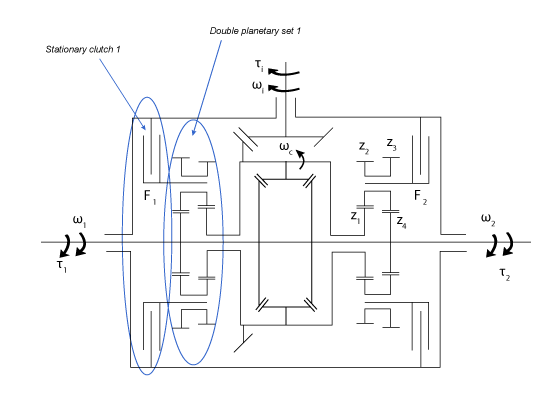
Double planetary gears, stationary clutches | Муфты закреплены на водиле и осях через двойные планетарные шестеренки |
Используйте Open Differential параметра Crown wheel (ring gear) located чтобы задать открытое дифференциальное положение, либо слева, либо справа от осевой линии.
В зависимости от доступных данных, чтобы задать метод соединения различных крутящих моментов, приложенных к осям, используйте Slip Coupling Coupling type параметра.
Настройка | Реализация блока |
|---|---|
Pre-loaded ideal clutch | Крутящий момент, моделируемый как сухая муфта с постоянными коэффициентами трения |
Slip speed dependent torque data | Крутящий момент, определенный из интерполяционной таблицы, который является функцией скольжения и давления сцепления |
Блок Active Differential не включает в себя контроллер или динамику внешнего привода сцепления. Используйте эту информацию для управления давлением в вход муфте. Информационная шина содержит скорости скольжения на муфте 1, Δωcl1 и муфте 2, Δωcl2.
Входной крутящий момент на оси | Δωcl1 | Δωcl2 | Входное Давление в муфте |
|---|---|---|---|
Положительный крутящий момент на оси 1 |
| Н/Д | Увеличение давления муфты 1 |
Положительный крутящий момент на оси 1 |
| Н/Д | Отсоедините муфту 1 и 2 |
Положительный крутящий момент на оси 2 | Н/Д |
| Увеличение давления муфты 1 |
Положительный крутящий момент на оси 2 | Н/Д |
| Отсоедините муфту 1 и 2 |
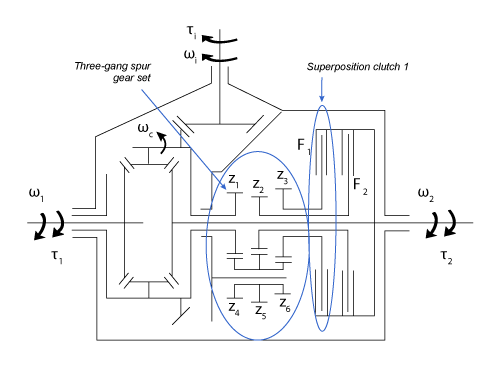
Блок Active Differential реализует эти уравнения, чтобы представлять механическую динамическую характеристику для строений суперпозиции и неподвижной муфты. Чтобы определить передаточные числа, блок использует скорость сцепления и количество зубьев для каждой пары передач. Допустимая разность оборотов колеса (AWSD) ограничивает разность оборотов колеса для положительного крутящего момента.
Механическая динамическая характеристика | Уравнения | |
|---|---|---|
Суперпозиционные муфты и Spur Gearing | Стационарные муфты и планетарная передача | |
Коронная передача |
|
|
Ось 1 |
|
|
Ось 2 |
|
|
Передаточные числа |
|
|
Ограничения, накладываемые на жесткие муфты |
|
|
Допустимая разность оборотов колеса (AWSD) |
|
|
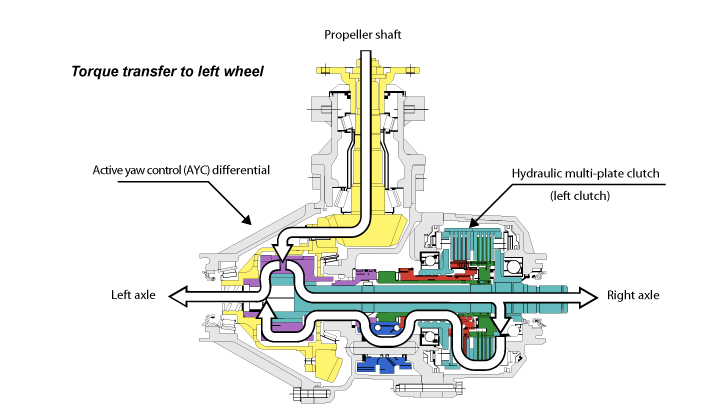
Эти рисунки муфты наложения показывают строение муфты и схему передачи крутящего момента на левое колесо.
Рисунки показывают строение и схему неподвижного сцепления.
Как для идеальной конфигурации муфты, так и для скользящей скорости, скользящая муфта является функцией скольжения и давления муфты. Скольжение зависит от скорости скольжения на каждом из интерфейсов сцепления.
Идеальная модель муфты сцепления использует скорость скольжения оси, давление сцепления и трение, чтобы вычислить крутящий момент сцепления. Коэффициент трения является функцией скольжения.
Чтобы вычислить общую силу сцепления, блок использует эффективный радиус, давление сцепления и усилие предварительной нагрузки сцепления.
Радиусы диска определяют эффективный радиус муфты, над которым действует сила муфты.
Чтобы вычислить крутящий момент сцепления, модель муфты скорости скольжения использует данные крутящего момента, который является функцией скорости скольжения и давления сцепления. Скорости вращения осей определяют скорость скольжения.
В уравнениях используются эти переменные.
| Aeff | Эффективная площадь давления сцепления |
| bd | Линейно-вязкое демпфирование коронной передачи |
| b1, b2 | Ось 1 и 2 линейного вязкого демпфирования, соответственно |
| Fc, FT | Усилие предварительной нагрузки муфты и общая сила, соответственно |
| Jd | Инерция вращения несущей |
| Jgc | Инерция вращения трехзвенника |
| Jc1, Jc2 | Планетарный носитель 1 и 2 вращательной инерции, соответственно |
| Jr1, Jr2 | Планетарная кольцевая шестерня 1 и 2 инерция вращения, соответственно |
| Js1, Js2 | Планетарная солнечная шестерня 1 и 2 вращательной инерции, соответственно |
| J1, J2 | Инерция вращения осей 1 и 2, соответственно |
| N | Передаточное отношение водила к валу |
| Nd | Количество дисков |
| Ns1, Ns2 | Передаточное отношение сцепления 1 и 2, соответственно |
| Np1, Np2 | Планетарное соотношение 1 и 2 водила к оси, соответственно |
| P1, P2 | Давление муфты 1 и 2, соответственно |
| Reff | Эффективный радиус сцепления |
| Ri, Ro | Внутренний и внешний радиусы кольцевого диска, соответственно |
| Tc | Крутящий момент муфты |
| Tcl1, Tcl2 | Крутящий момент муфты 1 и 2, соответственно |
| Td | Крутящий момент на валу привода |
| T1, T2 | Крутящий момент на оси 1 и 2, соответственно |
| Ti | Крутящий момент внутреннего сопротивления оси |
| Ti1, Ti2 | Крутящий момент внутреннего сопротивления осей 1 и 2 |
| ωd | Скорость вращения приводного вала |
| ϖ | Скольжение по скорости |
| ω1, ω2 | Оси 1 и 2 скорости вращения, соответственно |
Δωcl1, Δωcl2 | Муфта 1 и 2 скольжения на интерфейсе, соответственно |
ωcl1, ωcl2 | Муфта 1 и 2 скорости вращения, соответственно |
| μ | Коэффициент трения муфты |
| zi | Количество зубьев на зубчатой i |
[1] Deur, J., Иванович, В., Хэнкок, М., and Assadian, F. «Modeling of Active Differential Dynamics». В процедурах ASME. Транспортные системы. Том 17, стр.: 427-436.
