Идеальная коробка передач без сцепления или синхронизации
Блок-набор силовых агрегатов/трансмиссия/системы трансмиссии
Динамика автомобиля Blockset/Powertrain/Коробка передач
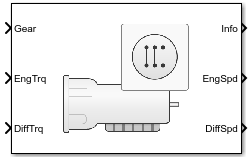
Ideal Fixed Gear Transmission реализует идеализированную передачу с фиксированной передачей без сцепления или синхронизации. Используйте блок для моделирования общего передаточного числа и потерь степени, когда вам не нужна подробная модель трансмиссии, например, в исследованиях размеров компонентов, экономии топлива и выбросов. Блок реализует модель передачи с минимальной параметризацией или вычислительными затратами.
Чтобы задать расчет эффективности блоков, для Efficiency factors выберите одну из этих опций.
| Настройка | Реализация блока |
|---|---|
Gear only | Эффективность, определяемый из интерполяционной таблицы 1D, которая является функцией передачи. |
Gear, input torque, input speed, and temperature | Эффективность, определенная из интерполяционной таблицы 4D, которая является функцией:
|
Блок использует это уравнение, чтобы определить динамику передачи:
Блок фильтрует командный сигнал передачи:
Когда Initial gear number, G_o равно 0, начальная передача является нейтральной. Блок использует эти параметры, чтобы отсоединить вход маховик от нижней передачи.
Initial input velocity, omega_o
Initial neutral input velocity, omegainN_o
Блок использует эти уравнения для нейтральной скорости передачи и маховика.
Для учета степени, блок реализует эти уравнения.
| Сигнал шины | Описание | Переменная | Уравнения | ||
|---|---|---|---|---|---|
|
|
| Степень Engine | Peng | |
PwrDiffrntl | Дифференциальная степень | Pdiff | |||
|
| PwrEffLoss | Механические потери степени | Peffloss | ||
PwrDampLoss | Механические потери демпфирования | Pdamploss | |||
|
| PwrStoredTrans | Изменение скорости во вращательной кинетической энергии | Pstr | ||
В уравнениях используются эти переменные.
| bN | Вязкое демпфирование привода |
| JN | Инерция вращения зацепления с шестерней |
| JF | Инерция вращения маховика |
| ηN | Зацепленная зубчатая эффективность |
| G | Номер зацепленной передачи |
| Gcmd | Номер передачи для взаимодействия |
| N | Передаточное число в зацеплении |
| Ti | Приложенный входной крутящий момент, обычно от коленчатого вала двигателя или демпфера маховика с двойной массой |
| To | Приложенный крутящий момент нагрузки, обычно от дифференциального или приводного вала |
| ωo | Начальная скорость вращения вала на входе |
| ωi, ώi | Приложенные угловая скорость и ускорение вала привода |
| ωNo | Начальная скорость вращения входной передачи нейтралей |
| ωneutral | Скорость вращения вала привода нейтралей |
| τs | Время сдвига константа |
