Независимая подвеска MacPherson
Динамика автомобиля Blockset/Подвеска
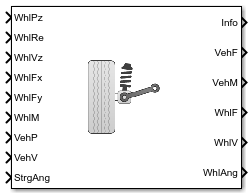
Блок Independent Suspension - MacPherson реализует независимую подвеску MacPherson для нескольких осей с несколькими дорожками на ось.
Блок моделирует податливость подвески, демпфирование и геометрические эффекты как функции относительных положений и скоростей транспортного средства и колеса с параметрами податливости и демпфирования оси. Используя податливость подвески и демпфирование, блок вычисляет силу подвески на транспортном средстве и колесе. Блок использует Z-нисходящую систему координат (определенную в SAE J670).
| Для каждого | Вы можете задать |
|---|---|
|
Ось |
|
|
След |
|
Блок содержит накопительные энергию пружинные элементы и рассеивающие энергию демпферные элементы. Он не содержит запоминающих энергию формообразующих элементов. Блок принимает, что транспортное средство (пружина) и колесо (непрессовка) блоки, соединенные с блоком, сохраняют связанную с массой энергию подвески.
В этой таблице представлены параметры блоков настройки для транспортного средства с:
Две оси
Две дорожки на ось
Вход угла поворота для обеих трасс на передней оси
Противокашлевая планка на передней оси
| Параметр | Настройка |
|---|---|
| Number of axles, NumAxl |
|
Number of tracks by axle, NumTracksByAxl |
|
| Steered axle enable by axle, StrgEnByAxl |
|
| Anti-sway axle enable by axle, AntiSwayEnByAxl |
|
Блок использует линейную пружину и демпфер, чтобы смоделировать вертикальные динамические эффекты системы подвески. Используя относительные положения и скорости транспортного средства и колеса, блок вычисляет вертикальные силы подвески на колесе и транспортном средстве. Блок использует линейное уравнение, которое связывает вертикальное демпфирование и податливость с высотой подвески, скоростью изменения высоты подвески и абсолютным значением углов поворота руля.
Блок реализует это уравнение.
Коэффициент демпфирования, c, зависит от настройки Enable active damping параметра.
Enable active damping настройки | Демпфирование |
|---|---|
off | Константа, c = cza |
on | Интерполяционная таблица, которая является функцией коэффициента заполнения активного демпфера и скорости привода |
Блок принимает, что элементы подвески не имеют массы. Поэтому силы подвески и моменты, приложенные к транспортному средству, равны силам подвески и моментам, приложенным к колесу.
Блок устанавливает положения колеса и скорости, равные боковым и продольным положениям и скоростям транспортного средства.
В уравнениях используются эти переменные.
| Fwza,t, Mwza,t | Сила подвески и момент, приложенные к колесу на оси |
| Fwxa,t, Mwxa,t | Сила подвески и момент, приложенные к колесу на оси |
| Fwya,t, Mwya,t | Сила подвески и момент, приложенные к колесу на оси |
| Fvza,t, Mvza,t | Сила подвески и момент, приложенные к транспортному средству на оси |
| Fvxa,t, Mvxa,t | Сила подвески и момент, приложенные к транспортному средству на оси |
| Fvya,t, Mvya,t | Сила подвески и момент, приложенные к транспортному средству на оси |
| Fz0a | Вертикальная подвеска предварительного поджатия пружины примененная к колесам на оси |
| kza | Вертикальный коэффициент упругости, применяемое к рельсам на оси |
| mhsteera | Угол поворота к наклону вертикальной силы, приложенный к колесу для треков на оси |
| δsteera,t | Вход угла поворота для |
| cza | Вертикальная демпфирующая константа, применяемая к рельсам на оси |
| Rewa,t | Эффективный радиус колеса для |
| Fzhstopa,t | Вертикальное усилие упора на оси |
| Fzaswya,t | Вертикальное противовыбросовое усилие на оси |
| zva,t, żva,t | Перемещение и скорость транспортного средства на оси |
| zwa,t, żwa,t | Перемещение пути и скорость на оси |
| xva,t, ẋva,t | Перемещение и скорость транспортного средства на оси |
| xwa,t, ẋwa,t | Перемещение пути и скорость на оси |
| yva,t, ẏva,t | Перемещение и скорость транспортного средства на оси |
| ywa,t, ẏwa,t | Перемещение пути и скорость на оси |
| Ha,t | Высота подвески на оси |
| Rewa,t | Эффективный радиус колеса на оси a, отслеживать t |
Сила обратной связи жесткого упора, Fzhstopa,t, которую применяет блок, зависит от того, сжимается или растягивается подвеска. Блок применяет силу:
При сжатии, когда подвеска сжата больше, чем максимальное расстояние, заданное параметром Suspension maximum height, Hmax.
В расширении, когда расширение подвески больше максимального расширения, заданного параметром Suspension maximum height, Hmax.
Чтобы вычислить силу, блок использует жесткость, основанную на гиперболическом тангенсе и экспоненциальном масштабировании.
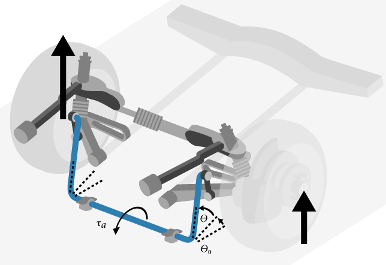
Опционально блок реализует противокашлевую силу, Fzaswya,t, для осей, которые имеют две дорожки. Этот рисунок показывает, как антикачающийся стержень передает крутящий момент между двумя независимыми дорожками подвески на общей оси. Каждая независимая подвеска прикладывает крутящий момент к противооткатному стержню через радиусный рычаг, который простирается от противооткатного стержня назад к независимой точке соединения подвески.
Чтобы вычислить силу наклонного стержня, блок реализует эти уравнения.
| Вычисление | Уравнение |
|---|---|
|
Угловое отклонение противоугона для заданной оси и колеи, Δϴa,t |
|
|
Противокашлевый угол скручивания, ϴa |
|
|
Крутящий момент анти-качения, τa |
|
|
Противокашлевые усилия, приложенные к колесу на оси |
|
Уравнения и рисунок используют эти переменные.
| τa |
Крутящий момент анти-качения |
| θ |
Противокашлевый угол поворота бруса |
| θ0a |
Начальный угол поворота противокашлевого стержня |
| Δϴa,t | Угловое отклонение противоугона на оси a, отслеживать t |
| r | Радиус рычага анти-качения |
| z0 | Расстояние по вертикали от точки соединения противокашлевого стержня до осевой линии противокашлевого стержня |
| Fzswaya,t |
Анти-наклонное усилие, приложенное к колесу на оси |
| zva,t |
Перемещение транспортного средства на оси |
| zwa,t |
Перемещение колеса на оси |
Чтобы вычислить углы развала, литья и носка, блок использует линейные функции высоты подвески и угла поворота руля.
В уравнениях используются эти переменные.
| ξa,t |
Угол развала колеса на оси |
| ηa,t |
Угол наклона колеса на оси |
| ζa,t |
Угол наклона колеса на оси |
| ξ0a, η0a, ζ0a |
Номинальная ось подвески с углами развала, литья и носка, соответственно, при нулевом угле поворота |
| mhcambera, mhcastera, mhtoea |
Крен, литье и углы наклона носка, соответственно, в зависимости от высоты подвески для |
| mcambersteera, mcastersteera, mtoesteera |
Камбер, кастер и углы наклона носка, соответственно, от угла наклона поворота руля для |
| mhsteera |
Угол рулевого управления от наклона вертикальной силы для осевых |
| δsteera,t |
Вход угла поворота для |
| zva,t |
Перемещение транспортного средства на оси |
| zwa,t |
Перемещение колеи на оси |
Вы также можете вводить углы поворота для дорожек. Чтобы вычислить углы поворота колес, блок смещает входные углы поворота с линейной функцией высоты подвески.
В уравнении используются эти переменные.
| mtoesteera |
Ось |
| mhsteera |
Ось |
| mhtoea |
Ось |
| δwhlsteera,t |
Угол поворота колеса для |
| δsteera,t |
Вход угла поворота для |
| zva,t |
Перемещение транспортного средства на оси |
| zwa,t |
Перемещение колеи на оси |
Блок вычисляет эти характеристики подвески для каждой оси, a, трек, t.
| Вычисление | Уравнение |
|---|---|
Рассеянная степень, Psuspa,t |
|
Поглощенная энергия, Esuspa,t |
|
Высота подвески, Ha,t |
|
Расстояние от центра колеса до интерфейса шина/дорога |
|
В уравнениях используются эти переменные.
| mhsteera | Угол поворота к наклону вертикальной силы, приложенный к колесу для треков на оси |
| δsteera,t | Вход угла поворота для |
| Rewa,t | Ось |
| Fz0a | Вертикальная подвеска предварительного поджатия пружины примененная к колесам на оси |
| zwtra,t | Расстояние от центра колеса до интерфейса шина/дорога, вдоль фиксированной оси Z автомобиля |
| zva,t, żva,t | Перемещение и скорость транспортного средства на оси |
| zwa,t, żwa,t | Перемещение пути и скорость на оси |
[1] Гиллеспи, Томас. Основы динамики аппарата. Warrendale, PA: Общество автомобильных инженеров, 1992.
[2] Комитет по стандартам динамики аппарата. Терминология динамики аппарата. J670 SAE. Warrendale, PA: Общество автомобильных инженеров, 2008.
[3] Технический комитет. Дорожные транспортные средства - Динамика аппарата и способность удерживать дороги - Словарь. ISO 8855:2011. Женева, Швейцария: Международная организация по стандартизации, 2011 год.
