Боковой контроллер отслеживания пути
Динамика автомобиля транспортное средство
Блок Lateral Driver реализует модель управления, чтобы сгенерировать нормированные команды управления, которые отслеживают перемещение боковой ссылки. Нормированные команды управления могут варьироваться от -1 до 1. Чтобы смоделировать динамику, блок использует линейную модель с одной дорожкой (велосипед). Используйте блок Lateral Driver для:
Закройте цикл между предопределенным путем и фактическим движением транспортного средства.
Сгенерируйте команды управления, которые отслеживают предопределенные пути. Можно подключить выход блока Lateral Driver к входам блока управления.
Используйте параметры External Actions для создания входных портов для сигналов, которые могут отключать, удерживать или переопределять команду рулевого управления с обратной связью. Блок использует этот порядок приоритета для входных команд: отключить (наивысший), удержать, переопределить. Блок использует этот порядок приоритета для входных команд: отключить (наивысший), удержать, переопределить.
В этой таблице представлены параметры внешнего действия.
| Цель | Параметр внешнего действия | Входные порты | Тип данных |
|---|---|---|---|
Переопределите команду рулевого управления с помощью команды входа рулевого управления. | Steering override |
| Boolean |
| double | ||
Удерживайте команду рулевого управления при текущем значении. | Steering hold | SteerHld | Boolean |
Отключите команду рулевого управления. | Steering disable | SteerZero | Boolean |
Используйте параметр Output handwheel angle, чтобы задать модули для портов рулевого управления.
Настройка | Реализация блока | Порт | |
|---|---|---|---|
| Командированный угол поворота, нормированный от -1 до 1. Блок использует параметр Tire wheel angle limit, theta предела насыщения угла колеса шины, чтобы нормализовать команду. |
| |
Переопределяет команду рулевого управления с вход команды рулевого управления, нормированной с -1 по 1. |
| ||
| Командированный угол поворота, в модулях, заданных Angular units, angUnits. |
| |
Переопределяет команду рулевого управления с входом командой рулевого управления в модулях, заданной Angular units, angUnits. |
| ||
Кроме того, можно задать предел насыщения угла колеса шины с помощью параметра Tire wheel angle limit, theta.
Используйте параметр Lateral control type, controlTypeLat, чтобы задать тип бокового управления. Таблица задает реализацию блока.
Настройка | Реализация блока | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Оптимальная одноточечная модель предпросмотра (посмотрите вперед) управления, разработанная С. С. Макадамом1, 2, 3. Модель представляет поведение управления рулевым управлением драйвера во время маневров следования по пути и избегания препятствий. Предварительный просмотр драйверов (посмотрите вперед), чтобы следовать предопределенному пути. | ||||||||||||
| Контроллер, который использует Stanley4 метод минимизации ошибки положения и ошибки угла текущего положения относительна ссылка положения. На панели Reference Control используйте:
|
Используйте параметр Angular units, angUnits, чтобы задать угловые единицы для входа и выходных портов.
Если вы задаете Lateral control type, controlTypeLat Predictive, блок Lateral Driver реализует оптимальную модель предпросмотра с одной точкой (посмотрите вперед) управления, разработанную C. C. macAdam1, 2, 3. Модель представляет поведение управления рулевым управлением драйвера во время маневров следования по пути и избегания препятствий. Предварительный просмотр драйверов (посмотрите вперед), чтобы следовать предопределенному пути. Для реализации модели MacAdam, блок:
Представляет динамику как линейное одноколейное (велосипедное) транспортное средство
Минимизирует предварительно просматриваемый сигнал ошибки в одной точке T * секунд вперед по времени
Учитывает задержку драйвера, вытекающую из перцепционных и нервно-мышечных механизмов
Этот рисунок иллюстрирует блок реализацию одноточечной версии модели драйвера.
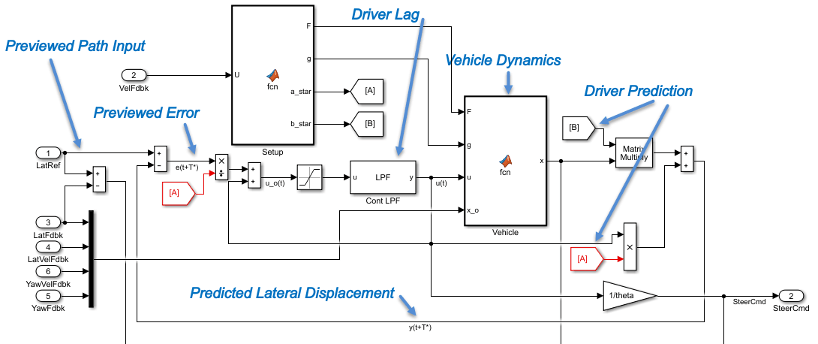
Для бокового и рыскательного движения, блок реализует эти линейные динамические уравнения.
В матричном обозначении:
Одноточечная модель принимает минимальный предварительно просмотренный сигнал ошибки в одной точке T * секунд вперед по времени. a * - способность драйвера предсказать будущий ответ транспортного средства на основе текущего входа управления рулевым управлением. b * - способность драйвера предсказать будущий ответ транспортного средства на основе текущего состояния транспортного средства. Блок использует эти уравнения.
В уравнениях используются эти переменные.
| a, b |
Расположение шин вперед и назад, соответственно |
| m |
Масса транспортного средства |
| I |
Инерция вращения транспортного средства |
| CɑF |
Коэффициент поворота передней шины |
| CɑR |
Коэффициент поворота задней шины |
| a*, b* |
Скаляр предсказания драйвера и векторное усиление, соответственно |
| x |
Предсказанный вектор состояния транспортного средства |
| v | Поперечная скорость |
| r |
Скорость рыскания |
| Ψ |
Угол рыскания переднего колеса |
| y |
Боковое перемещение |
| F |
Системная матрица |
| δ, δF | Угол поворота и угол поворота передней оси, соответственно |
| g |
Вектор коэффициента управления |
| U | Скорость прямого (продольного) транспортного средства |
| T* |
Предварительный просмотр временного окна |
| ƒ(t+T*) |
Предварительно просматриваемый путь на T * секунд вперед |
| U |
Скорость прямого транспортного средства |
| mT |
Вектор постоянного наблюдения; обеспечивает боковое положение транспортного средства |
Одноточечная модель, реализованная блоком, находит команду рулевого управления, которая минимизирует локальный индекс эффективности, J, за текущий интервал предварительного просмотра (t, t+T).
Чтобы минимизировать J относительно команды рулевого управления, это условие должно быть выполнено.
Можно выразить оптимальное решение по управлению с точки зрения текущей неоптимальной и соответствующей ненулевой выходной ошибки предварительного просмотра на T* секунд вперед1, 2, 3.
Блок использует расстояние предварительного просмотра и продольную скорость транспортного средства, чтобы определить временное окно предварительного просмотра.
В уравнениях используются эти переменные.
| T* | Предварительный просмотр временного окна |
| ƒ(t+T*) | Предварительно просматриваемый путь на T* с вперед |
| y(t+T*) | Предварительный просмотр выходных данных объекта T* с опережением |
| e(t+T*) | Предварительно просматриваемый сигнал ошибки на T* секунд вперед |
| u(t), uo(t) | Угол поворота и оптимальный угол поворота, соответственно |
| L | Предварительный просмотр расстояния |
| J | Индекс эффективности |
| U | Скорость прямого (продольного) транспортного средства |
Одноточечная модель, реализованная блоком, вводит задержку драйвера. Задержка драйвера учитывает задержку, когда драйвер отслеживает задачи. В частности, это задержка транспорта, вытекающая из перцепционных и нервно-мышечных механизмов. Чтобы вычислить драйвер задержку переноса, блок реализует это уравнение.
В уравнениях используются эти переменные.
| τ | Задержка транспортировки драйвера |
| y(t+T*) | Предварительный просмотр выходных данных объекта T* с опережением |
| e(t+T*) | Предварительно просматриваемый сигнал ошибки на T* секунд вперед |
| u(t), uo(t) | Угол поворота и оптимальный угол поворота, соответственно |
| J | Индекс эффективности |
Если вы задаете Lateral control type, controlTypeLat Stanley, блок реализует метод Стэнли4. Чтобы вычислить команду угла поворота, контроллер Стэнли минимизирует ошибку положения и ошибку угла текущего положения относительно положения ссылки. Направление движения транспортного средства определяет эти значения ошибки.
Чтобы вычислить команду угла поворота, контроллер минимизирует ошибку положения и ошибку угла текущего положения относительно положения ссылки.
Это position error - боковое расстояние от центра тяжести транспортного средства (CG) до контрольной точки на пути.
angle error является углом транспортного средства относительно ссылки пути.
LongRef - Ссылка на продольное перемещениеscalarСсылка на перемещение продольного центра масс (CM), в инерционной системе координат, в м.
Чтобы включить этот порт:
Установите Lateral control type, controlTypeLat значение Stanley
Очистить Vector input for reference and feedback
LatRef - Ссылка на боковое перемещениеscalarПеремещение бокового центра масс ( CM) ссылки, в инерционной системе координат, в м.
Чтобы включить этот порт, выполните одно из следующих действий:
Установите Lateral control type, controlTypeLat значение Stanley и очистить Vector input for reference and feedback.
Установите Lateral control type, controlTypeLat значение Predictive.
EnblSteerOvr - Включить переопределение команды рулевого управленияscalarВключите переопределение команды рулевого управления.
Чтобы включить этот порт, выберите Steering override.
Типы данных: Boolean
SteerOvrCmd - Команда переопределения рулевого управленияscalarКоманда переопределения рулевого управления.
Используйте параметр Output handwheel angle, чтобы задать модули для портов рулевого управления.
Настройка | Реализация блока | Порт | |
|---|---|---|---|
| Командированный угол поворота, нормированный от -1 до 1. Блок использует параметр Tire wheel angle limit, theta предела насыщения угла колеса шины, чтобы нормализовать команду. |
| |
Переопределяет команду рулевого управления с вход команды рулевого управления, нормированной с -1 по 1. |
| ||
| Командированный угол поворота, в модулях, заданных Angular units, angUnits. |
| |
Переопределяет команду рулевого управления с входом командой рулевого управления в модулях, заданной Angular units, angUnits. |
| ||
Чтобы включить этот порт, выберите Steering override.
Типы данных: double
SteerHld - Удержание рулевого управленияscalarЛогический сигнал, который содержит команду управления при текущем значении.
Чтобы включить этот порт, выберите Steering hold.
Типы данных: Boolean
SteerZero - Отключить команду рулевого управленияscalarОтключите команду рулевого управления.
Чтобы включить этот порт, выберите Steering disable.
Типы данных: Boolean
YawRef - Ссылка угла рысканияscalarТранспортное средство угол рыскания, Ψo, в инерционной системе координат, в модулях, заданных Angular units, angUnits.
Чтобы включить этот порт:
Установите Lateral control type, controlTypeLat значение Stanley
Очистить Vector input for reference and feedback
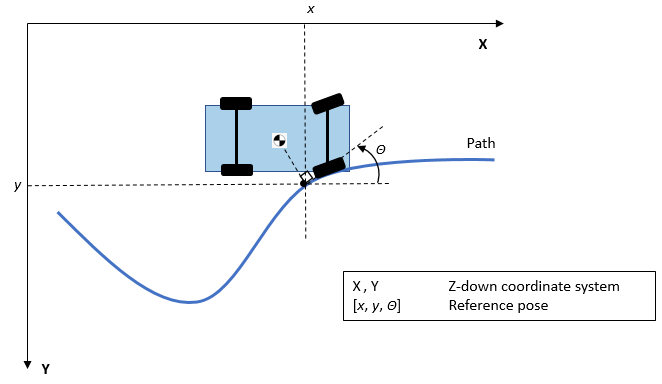
RefPose - Эталонное положениеСсылочное положение, заданное как вектор [x, y, Θ]. x и y указаны в метрах, а Θ указаны в модулях, заданных Angular units, angUnits.
x и y задайте точку ссылки, к которой нужно направить транспортному средству. Θ задает угол ориентации пути в этой контрольной точке и положительный в направлении против часовой стрелки.
Точка ссылки является точкой на пути, которая находится ближе всего к транспортному средству CG. Можно использовать систему координат Z-up или Z-down транспортного средства при условии, что для блока входов и параметров используется одна и та же система координат (Z-up или Z-down).
Чтобы включить этот порт, установите Lateral control type, controlTypeLat равным Stanley и выберите Vector input for reference and feedback pose.
Типы данных: single | double
VelFdbk - Продольная скорость транспортного средстваscalarПродольная скорость транспортного средства, U, в неподвижной системе координат транспортного средства, в м/с.
CurrPose - Положение токаПоложение тока транспортного средства, заданное как вектор [x, y, Θ]. x и y указаны в метрах, а Θ указаны в модулях, заданных Angular units, angUnits.
x и y указать местоположение транспортного средства, которое определяется как CG транспортного средства. Можно использовать систему координат Z-up или Z-down транспортного средства при условии, что для блока входов и параметров используется одна и та же система координат (Z-up или Z-down).
Чтобы включить этот порт, установите Lateral control type, controlTypeLat равным Stanley и выберите Vector input for reference and feedback pose.
Типы данных: single | double
LatFdbk - Боковое перемещениеscalarБоковое перемещение CM, yo, в инерционной системе координат, в м.
Чтобы включить этот порт, выполните одно из следующих действий:
Установите Lateral control type, controlTypeLat значение Stanley и очистить Vector input for reference and feedback.
Установите Lateral control type, controlTypeLat значение Predictive.
LatVelFdbk - Боковая скорость транспортного средстваscalarБоковая скорость транспортного средства, vo, в неподвижной системе координат транспортного средства, в м/с.
Чтобы включить этот порт, Установите Lateral control type, controlTypeLat на Predictive.
YawFdbk - Угол рыскания транспортного средстваscalarТранспортное средство угол рыскания, Ψo, в инерционной системе координат, в модулях, заданных Angular units, angUnits.
Чтобы включить этот порт, выполните одно из следующих действий:
Установите Lateral control type, controlTypeLat значение Stanley и очистить Vector input for reference and feedback pose.
Установите Lateral control type, controlTypeLat значение Predictive.
YawVelFdbk - Скорость рысканияscalarСкорость рыскания, ro, в неподвижной системе координат автомобиля, в модулях, заданных как Angular units, angUnits в секунду.
Чтобы включить этот порт, Установите Lateral control type, controlTypeLat на Predictive.
[1] MacAdam, C. C. «Оптимальное управление предпросмотром для линейных систем». Журнал динамических систем, измерений и управления. Том 102, № 3, сентябрь 1980.
[2] MacAdam, C. C. «Application of Optimal Preview Control for Simulation of Closed-Loop Automobile Driving». Транзакции IEEE по системам, человеку и кибернетике. Том 11, выпуск 6, июнь 1981 года.
[3] MacAdam, C. C. Разработка моделей взаимодействия водитель/машина с управлением для динамического анализа. Окончательный технический отчет UMTRI-88-53. Энн Арбор, Мичиган: Научно-исследовательский институт транспорта Мичиганского университета, декабрь 1988 года.
[4] Гофман, Габриэль М., Клэр Дж. Томлин, Майкл Монтемерло и Себастьян Трун. Autonomobile Automobile Trajectory Tracking for Off-Road Driving: Проектирование контроллера, Experimental Validation and Racing (неопр.) (недоступная ссылка). Американская контрольная конференция. 2007, стр 2296–2301. doi:10.1109/ACC.2007.4282788
