Найдите Декартовы координаты линий, описанных парами rho и theta
Преобразовывает
s
Блок Hough Lines находит точки пересечения между граничными линиями опорного изображения и линией, заданной парой (rho, theta). Блок выводит одну основанную на [x y] координату для точек пересечения. Граничные линии указывают левые и правые вертикальные контуры и верхние и нижние горизонтальные контуры опорного изображения.
Если линия, заданная парой (rho, theta), не пересекает две пограничные линии на ссылку изображении, блок выводит значения, [(0,0), (0,0)]. Это выходное значение пересечения позволяет следующему блоку в модели игнорировать точки. Обычно Hough Lines блок предшествует блоку, который рисует точку или форму на пересечении.
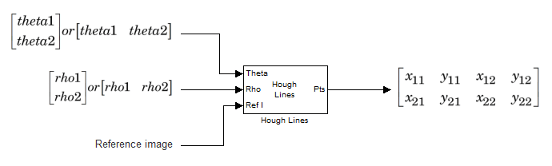
Следующий рисунок показывает входные и выходные координаты для блока Hough Lines.
| Порт | Ввод/вывод | Поддерживаемые типы данных | Комплексные числа |
|---|---|---|---|
Theta | Вектор значений theta, которые представляют входные линии |
| Нет |
Ро | Вектор значений rho, которые представляют входные линии | То же, что и порт Theta | Нет |
Ссылка I | Матрица, которая представляет двоичное изображение или матрицу интенсивности, которая представляет одну плоскость изображения RGB |
| Нет |
Pts | M -by-4 матрица значений пересечения, где M - количество входных линий |
| Нет |
Если вы выбираете Trigonometric functionблок вычисляет значения синуса и косинуса, чтобы вычислить пересечения линий во время симуляции. Если вы выбираете Table lookupблок вычисляет и сохраняет тригонометрические значения, чтобы вычислить пересечения линий перед началом симуляции. В этом случае блоку требуется дополнительная память.
Для входов с плавающей точкой установите параметр Sine value computation method равным Trigonometric function. Для входов с фиксированной точкой установите параметр равным Table lookup.
Используйте этот параметр, чтобы задать интервал между осями теты. Этот параметр появляется в диалоговом окне, только если для параметра Sine value computation method вы выбираете Table lookup. параметр появляется в диалоговом окне.
Выберите режим округления для операций с фиксированной точкой.
Выберите режим переполнения для операций с фиксированной точкой.
Выберите способ определения размера слова для значений синусоидальной таблицы. Длина дроби значений синусоидальной таблицы всегда равна размеру слова минус единица:
Когда вы выбираете Specify word length, можно ввести размер слова синусоидальной таблицы.
Значения синусоидальной таблицы не подчиняются параметрам Rounding mode и Overflow mode; они насыщаются и округлятся до Nearest.
Используйте этот параметр, чтобы задать, как обозначить это выходное слово продукта и длины дроби:
Когда вы выбираете Same as first inputхарактеристики совпадают с характеристиками первого входа в блок.
Когда вы выбираете Binary point scaling, можно ввести размер слова и длину дроби выходного продукта, в битах.
Когда вы выбираете Slope and bias scaling, можно ввести размер слова, в битах, и наклон продукта выхода. Все сигналы в блоках Computer Vision Toolbox™ имеют смещение 0.
Смотрите Типы данных умножения для рисунков, описывающих использование выхода продукта.
Используйте этот параметр, чтобы задать, как вы хотите обозначить слово аккумулятора и длины дроби.
Когда вы выбираете Same as product output характеристики соответствуют характеристикам выходного продукта.
Когда вы выбираете Binary point scaling, можно ввести Word length и Fraction length аккумулятора, в битах.
Когда вы выбираете Slope and bias scalingможно ввести Word length, в битах и Slope Accumulator. Все сигналы в программном обеспечении Computer Vision Toolbox имеют смещение 0.
См. Типы данных умножения для рисунков, описывающих использование типа данных аккумулятора в этом блоке.
Выберите этот параметр, чтобы инструменты с фиксированной точкой не переопределяли типы данных, заданные в маске блока. Для получения дополнительной информации см. fxptdlg (Fixed-Point Designer), ссылочная страница на Fixed-Point Tool в Simulink® документация.
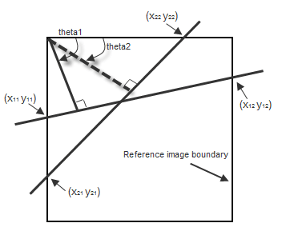
Следующий рисунок показывает Линию 1, пересекающую контуры опорного изображения в [(x11, y11) (x12, y12)] и линия 2, пересекающая контуры в [(x21, y21) (x22, y22)]
Computer Vision Toolbox | |
Computer Vision Toolbox |
