Оцените скорости объекта
Computer Vision Toolbox/Анализ и совершенствование
Блок Оптический поток оценивает направление и скорость движения объекта между двумя изображениями или между одним видеокадром в другую систему координат с помощью метода Хорна-Шунка или Лукаса-Канаде.
Типы данных |
|
Многомерные сигналы |
|
Сигналы переменного размера |
|
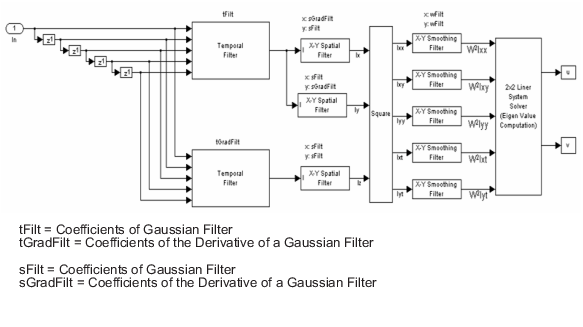
Если вы задаете временный градиентный фильтр равным Derivative of Gaussian, u и v решаются с помощью этих шагов.
Вычислить и .
Используйте Гауссов фильтр, чтобы выполнить временную фильтрацию. Задайте временные характеристики фильтра, такие как стандартное отклонение и количество коэффициентов фильтра, используя параметр Number of frames to buffer for temporal smoothing.
Используйте Гауссов фильтр и производную Гауссов фильтр, чтобы сглаживать изображение с помощью пространственной фильтрации. Задайте стандартное отклонение и длину фильтра сглаживания изображения при помощи параметра Standard deviation for image smoothing filter.
Вычислить между изображениями 1 и 2.
Используйте производную Гауссова фильтра для выполнения временной фильтрации. Задайте временные характеристики фильтра, такие как стандартное отклонение и количество коэффициентов фильтра, используя параметр Number of frames to buffer for temporal smoothing.
Используйте фильтр, описанный на шаге 1b, чтобы выполнить пространственную фильтрацию на выходе временного фильтра.
Сглаживайте компоненты градиента, , , и , при помощи градиентного сглаживающего фильтра. Используйте параметр Standard deviation for gradient smoothing filter, чтобы задать стандартное отклонение и количество коэффициентов фильтра для фильтра сглаживания градиента.
Решить линейные уравнения 2 на 2 для каждого пикселя используя этот метод:
Если
тогда собственные значения A будут
Когда блок находит собственные значения, он сравнивает их с порогом, , что соответствует значению, которое вы вводите для параметра Threshold for noise reduction. Результаты попадают в один из следующих случаев.
Дело 1: и
A несингулярна, поэтому блок решает систему уравнений, используя правило Крамера.
Дело 2: и
A сингулярна (неинвертируема), поэтому блок нормализует градиентный поток, чтобы вычислить u и v.
Дело 3: и
оптический поток u и v равен 0.
Block Matching | Gaussian Pyramid | opticalFlow | opticalFlowHS | opticalFlowLK | opticalFlowLKDoG
