Выравнивание двух потоков пиксельных данных
The visionhdl.PixelStreamAligner Система object™ синхронизирует два потока пикселей путем задержки одного потока, чтобы соответствовать времени опорного потока. Многие алгоритмы Vision HDL Toolbox™ задерживают поток пикселей, и величина задержки может измениться, когда вы настраиваете параметры алгоритма. Можно использовать этот объект для выравнивания потоков для наложения, сравнения или объединения двух потоков, таких как операция Гауссова размытия. Используйте задержанный поток в качестве refPixel и refCtrl аргументы. Используйте более ранний поток в качестве pixelIn и ctrlIn аргументы.
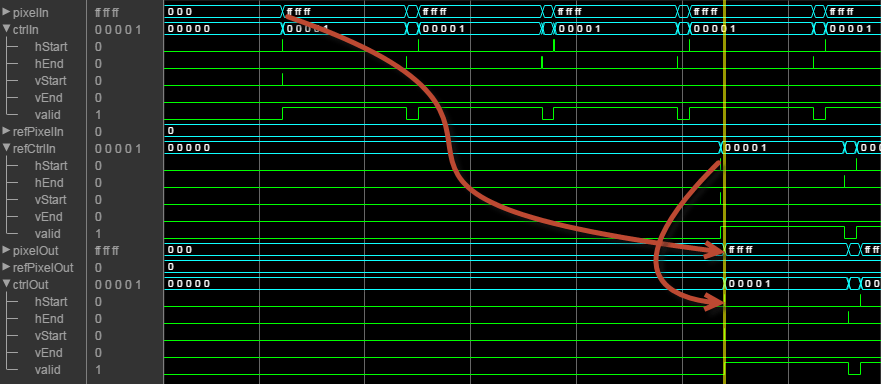
Эта схема формы волны показывает входные потоки, pixelIn и refPixelInи связанных с ними управляющих сигналов. Ссылка входного кадра начинается позже, чем pixelIn система координат. Сигналы выхода показывают, что объект задерживает pixelIn чтобы соответствовать потоку ссылки и чтобы оба потока выхода совместно использовали сигналы управления. Форма волны показывает короткую задержку между входом refCtrl и выходные refCtrl. В этой симуляции, чтобы вместить задержку четырёх линий между входными потоками, MaxNumberofLines свойство должно быть установлено равным не менее 4.
Для получения дополнительной информации о пиксельной шине управления и размерностях видеокадра, смотрите Потоковый Интерфейс Пикселя.
Чтобы выровнять два потока пиксельных данных:
Создайте visionhdl.PixelStreamAligner Объекту и установите его свойства.
Вызывайте объект с аргументами, как будто это функция.
Дополнительные сведения о работе системных объектов см. в разделе «Что такое системные объекты?».
align = visionhdl.PixelStreamAligner(Name,Value)
align = visionhdl.PixelStreamAligner(Name,Value) создает Системный объект, который синхронизирует поток пикселей с потоком ссылки пикселей. Задайте свойства с помощью одной или нескольких пар "имя-значение". Заключайте каждое имя свойства в одинарные кавычки. Для примера, 'MaxNumberOfLines',16 устанавливает глубину буфера, которая соответствует смещению синхронизации между двумя входными потоками.
[pixelOut,refOut,ctrlOut]
= align(pixelIn,ctrlIn,refPixel,refCtrl)
[ синхронизирует поток пикселей с потоком ссылки, pixelOut,refOut,ctrlOut]
= align(pixelIn,ctrlIn,refPixel,refCtrl)refPixel и refCtrl, задерживая первый вход, pixelIn, для выравнивания по входу ссылки. Получившиеся выровненные потоки пикселей, pixelOut и refOut, совместное использование управляющих сигналов, ctrlOut. Можно использовать этот объект для выравнивания потоков для наложения или сравнения.
Этот объект использует интерфейс потокового пикселя со структурой для сигналов управления системой координат. Этот интерфейс позволяет объекту работать независимо от размера и формата изображения и соединяться с другими объектами Vision HDL Toolbox. Объект принимает и возвращает скалярное значение пикселя и сигналы управления как структуру, содержащую пять сигналов. Сигналы управления указывают валидность каждого пикселя и его местоположение в системе координат. Чтобы преобразовать пиксельную матрицу в поток пикселей и сигналы управления, используйте visionhdl.FrameToPixels объект. Полное описание интерфейса см. в разделе Потоковый пиксельный интерфейс.
Чтобы использовать функцию объекта, задайте системный объект в качестве первого входного параметра. Например, чтобы освободить системные ресурсы системного объекта с именем obj, используйте следующий синтаксис:
release(obj)
Наложите обработанный видеопоток на вход поток.
Подготовьте тестовое изображение путем выбора фрагмента файла изображения.
frmActivePixels = 64; frmActiveLines = 48; frmOrig = imread('rice.png'); frmInput = frmOrig(1:frmActiveLines,1:frmActivePixels); figure imshow(frmInput,'InitialMagnification',300) title 'Input Image'
![]()
Создайте сериализатор и укажите размер неактивных пиксельных областей.
frm2pix = visionhdl.FrameToPixels( ... 'NumComponents',1, ... 'VideoFormat','custom', ... 'ActivePixelsPerLine',frmActivePixels, ... 'ActiveVideoLines',frmActiveLines, ... 'TotalPixelsPerLine',frmActivePixels+10, ... 'TotalVideoLines',frmActiveLines+10, ... 'StartingActiveLine',6, ... 'FrontPorch',5);
Сериализуйте тестовое изображение. pixIn является вектором значений интенсивности. ctrlIn является вектором структур управляющего сигнала. Предварительно выделите векторы для сигналов выхода.
[pixIn,ctrlIn] = frm2pix(frmInput);
[~,~,numPixelsPerFrame] = getparamfromfrm2pix(frm2pix);
ctrlOut = repmat(pixelcontrolstruct,numPixelsPerFrame,1);
overlayOut = zeros(numPixelsPerFrame,1,'uint8');
Написание функции, которая создает и вызывает системные объекты для обнаружения ребер и выравнивания данных о ребрах с исходными пиксельными данными. Результаты ребра задерживаются задержкой visionhdl.EdgeDetector объект. Соответствующие сигналы управления становятся ссылкой для выровненного потока. Вы можете сгенерировать HDL из этой функции.
function [pixelOut,ctrlOut] = EdgeDetectandOverlay(pixelIn,ctrlIn) % EdgeDetectandOverlay % Detect edges in an input stream, and overlay the edge data onto the % original stream. % pixelIn and ctrlIn are a scalar pixel and its associated pixelcontrol % structure, respectively. % You can generate HDL code from this function. persistent align if isempty(align) align = visionhdl.PixelStreamAligner; end persistent find_edges if isempty(find_edges) find_edges = visionhdl.EdgeDetector; end [edgeOut,edgeCtrl] = find_edges(pixelIn,ctrlIn); [origOut,alignedEdgeOut,ctrlOut] = align(pixelIn,ctrlIn,edgeOut,edgeCtrl); if (alignedEdgeOut) pixelOut = uint8(0); % Set edge pixels to black else pixelOut = origOut; end end
Для каждого пикселя в систему координат вызовите функцию для поиска ребер и выравнивания данных о кромке по входу потоку.
for p = 1:numPixelsPerFrame [overlayOut(p),ctrlOut(p)] = EdgeDetectandOverlay(pixIn(p),ctrlIn(p)); end
Создайте объект десериализатора с форматом, соответствующим формату сериализатора. Преобразуйте поток пикселей в систему координат изображения путем вызова объекта десериализатора. Отобразите получившееся изображение.
pix2frm = visionhdl.PixelsToFrame( ... 'NumComponents',1, ... 'VideoFormat','custom', ... 'ActivePixelsPerLine',frmActivePixels, ... 'ActiveVideoLines',frmActiveLines); [frmOutput,frmValid] = pix2frm(overlayOut,ctrlOut); if frmValid figure imshow(frmOutput,'InitialMagnification',300) title 'Output Image' end
![]()
