Трехфазный синхронный двигатель со встроенными постоянными магнитами с синусоидальной противоэлектродвижущей силой
Powertrain Blockset / Движение / Электродвигатели и Инверторы
Motor Control Blockset / Электрические системы / Двигатели
Блок Interior PMSM реализует трехфазный внутренний постоянный магнит синхронный двигатель (PMSM) с синусоидальной противоэлектродвижущей силой. Блок использует трехфазные входные напряжения, чтобы отрегулировать отдельные токи фазы, позволяя управление крутящего момента двигателя или скорости.
По умолчанию блок устанавливает параметр Simulation type на Continuous использовать время непрерывной выборки в процессе моделирования. Если вы хотите сгенерировать код для двойных и одинарных точностей фиксированного шага, рассматривая установку параметра на Discrete. Затем задайте параметр Sample Time, Ts.
На вкладке Parameters, если вы выбираете Back-emf, блок реализует это уравнение, чтобы вычислить постоянное постоянное потокосцепление.
Этот рисунок показывает моторную конструкцию с однополюсной парой на двигателе.
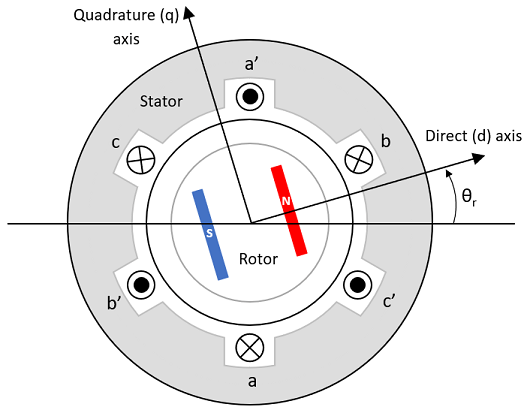
Моторное магнитное поле из-за постоянных магнитов создает синусоидальную скорость изменения потока с моторным углом.
Для соглашения осей a - выравниваются фаза и потоки постоянного магнита, когда моторный угол θr является нулем.
Блок реализует эти уравнения, описанные в моторной системе координат потока (dq система координат). Все количества в моторной системе координат отнесены в статор.
Lq и индуктивность Ld представляют отношение между индуктивностью фазы и моторным положением из-за выступа двигателя.
Уравнения используют эти переменные.
Lq, Ld | q-и d-составляющие-индукции (H) |
R | Сопротивление обмоток статора (Ом) |
iq, id | q-и токи d-оси (A) |
vq, vd | q-и напряжения d-оси (V) |
ωm | Угловая механическая скорость двигателя (rad/s) |
ωe | Угловая электрическая скорость двигателя (rad/s) |
λpm | Постоянное потокосцепление, постоянное (Wb) |
Ke | Противоэлектродвижущая сила (EMF) (Vpk_LL/krpm, где Vpk_LL является пиковым измерением от линии к линии напряжения), |
P | Количество пар полюсов |
Te | Электромагнитный крутящий момент (Nm) |
Θe | Электрический угол (рад) |
Моторной скоростью вращения дают:
Уравнения используют эти переменные.
J | Объединенная инерция двигателя и загрузки (kgm^2) |
F | Объединенное вязкое трение двигателя и загрузка (N · m / (rad/s)) |
θm | Моторное механическое угловое положение (рад) |
Tm | Крутящий момент вала двигателя (Nm) |
Te | Электромагнитный крутящий момент (Nm) |
Tf | Вал двигателя статический момент трения (Nm) |
ωm | Угловая механическая скорость двигателя (rad/s) |
Для учета степени блок реализует эти уравнения.
| Сигнал шины | Описание | Переменная | Уравнения | ||
|---|---|---|---|---|---|
|
|
| Механическая энергия | Pmot | |
PwrBus | Электроэнергия | Pbus | |||
|
| PwrElecLoss | Резистивные потери мощности | Pelec | ||
PwrMechLoss | Потеря механической энергии | Pmech | Когда Port Configuration установлен в Когда Port Configuration установлен в | ||
|
| PwrMtrStored | Сохраненная моторная степень | Pstr | ||
Уравнения используют эти переменные.
R s | Сопротивление статора (Ом) |
ia, ib, ic | Фаза a Stator, b, и c ток (A) |
isq, isd | Статор q-и токи d-оси (A) |
van, vbn, vcn | Фаза a Stator, b, и c напряжение (V) |
ωm | Угловая механическая скорость ротора (rad/s) |
F | Объединенный двигатель и загружает вязкое затухание (N · m / (rad/s)) |
Te | Электромагнитный крутящий момент (Nm) |
Tf | Объединенный двигатель и момент трения загрузки (Nm) |
Блок использует эти уравнения, чтобы реализовать амплитудное инвариантное преобразование dq, чтобы гарантировать, что dq и три амплитуды фазы равны.
Уравнения используют эти переменные.
Θda | Статор dq электрический угол относительно ротора a - ось (рад) |
vsq, vsd | Статор q - и d - напряжения оси (V) |
isq, isd | Статор q - и d - токи оси (A) |
| va, vb, vc | Фазы a напряжения статора, b, c (V) |
| ia, ib, ic | Текущие фазы a статора, b, c (A) |
[1] Kundur, P. Устойчивость энергосистемы и управление. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993.
[2] Андерсон, пополудни анализ неработающих энергосистем. Хобокен, NJ: нажатие Wiley-IEEE, 1995.
Interior PM Controller | Flux-Based PMSM | Induction Motor | Mapped Motor | Surface Mount PMSM
