Основанный на потоке постоянный магнит синхронный двигатель
Powertrain Blockset / Движение / Электродвигатели и Инверторы
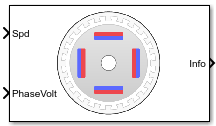
Блок Flux-Based PMSM реализует основанный на потоке трехфазный постоянный магнит синхронный двигатель (PMSM) с табличной электродвижущей силой. Блок использует трехфазные входные напряжения, чтобы отрегулировать отдельные токи фазы, позволяя управление крутящего момента двигателя или скорости.
Основанные на потоке модели электродвигателя учитывают магнитное насыщение и потери в железе. Чтобы вычислить магнитное насыщение и потерю в железе, блок Flux-Based PMSM использует инверсию потокосцеплений. Чтобы получить параметры блоков, можно использовать анализ конечных элементов (FEA) или измерить напряжения фазы с помощью динамометра.
По умолчанию блок устанавливает параметр Simulation Type на Continuous использовать время непрерывной выборки в процессе моделирования. Если вы хотите сгенерировать код для двойных и одинарных точностей фиксированного шага, рассматривая установку параметра на Discrete. Затем задайте параметр Sample Time, Ts.
Чтобы включить вычисления потерь мощности, подходящие для целей генерации кода, которые ограничивают память, выберите Enable memory optimized 2D LUT.
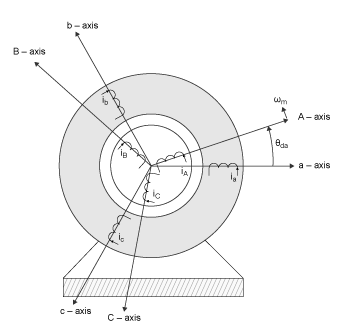
Блок реализует уравнения, которые описываются в стационарной ссылке ротора (dq) система координат. D-ось выравнивается с осью a. Все количества в системе координат ротора отнесены в статор.
Блок использует эти уравнения.
| Вычисление | Уравнение |
|---|---|
| q-и напряжение d-оси | |
| q-и текущая d-ось | |
| Электромеханический крутящий момент |
Уравнения используют эти переменные.
|
ωm |
Скорость механического устройства ротора |
|
ωe | Ротор электрическая скорость |
|
Θda |
статор dq электрический угол относительно ротора ось |
|
Rs, Rr |
Сопротивление статора и обмоток ротора, соответственно |
|
iq, id |
q-и текущая d-ось, соответственно |
|
vq, vd |
q-и напряжение d-оси, соответственно |
| Ψq, Ψd |
q-и магнитный поток d-оси, соответственно |
|
P |
Количество пар полюсов |
|
Te |
Электромагнитный крутящий момент |
Чтобы вычислить напряжения и токи в трехфазном сбалансированном (a, b) количества, двухфазная квадратура (α, β) количества, и вращающийся (d, q) системы координат, блок использует Преобразования Кларка и Парка.
В уравнениях преобразования.
| Преобразовать | Описание | Уравнения |
|---|---|---|
|
Кларк |
Преобразует сбалансированные трехфазные количества (a, b) в сбалансированные двухфазные квадратурные количества (α, β). | |
|
Парк |
Преобразует сбалансированные двухфазные ортогональные стационарные количества (α, β) в ортогональную систему координат вращения (d, q). | |
|
Инверсия Кларк |
Преобразует сбалансированные двухфазные квадратурные количества (α, β) в сбалансированные трехфазные количества (a, b). | |
|
Обратный парк |
Преобразует ортогональную систему координат вращения (d, q) в сбалансированные двухфазные ортогональные стационарные количества (α, β). |
Преобразования используют эти переменные.
| ωm |
Скорость механического устройства ротора |
| P |
Моторные пары полюса |
| ωe |
Ротор электрическая скорость |
| Θe |
Ротор электрический угол |
| x |
Ток фазы или напряжение |
Скоростью вращения ротора дают:
Уравнения используют эти переменные.
J | Объединенная инерция ротора и загрузки |
F | Объединенное вязкое трение ротора и загрузка |
θm | Угловое положение механического устройства ротора |
Tm | Крутящий момент вала ротора |
Te | Электромагнитный крутящий момент |
Tf | Объединенный ротор и момент трения загрузки |
ωm | Скорость механического устройства ротора |
Для учета степени блок реализует эти уравнения.
| Сигнал шины | Описание | Переменная | Уравнения | ||
|---|---|---|---|---|---|
|
|
| Механическая энергия | Pmot | |
PwrBus | Электроэнергия | Pbus | |||
|
| PwrElecLoss | Резистивные потери мощности | Pelec | ||
PwrMechLoss | Потеря механической энергии | Pmech | Когда Port Configuration установлен в Когда Port Configuration установлен в | ||
|
| PwrMtrStored | Сохраненная моторная степень | Pstr | ||
Уравнения используют эти переменные.
Rs | Сопротивление статора |
ia, ib, ic | Фаза a Stator, b, и c ток |
isq, isd | Статор q-и токи d-оси |
van, vbn, vcn | Фаза a Stator, b, и c напряжение |
ωm | Угловая механическая скорость ротора |
F | Объединенный двигатель и загружает вязкое затухание |
Te | Электромагнитный крутящий момент |
Tf | Объединенный двигатель и момент трения загрузки |
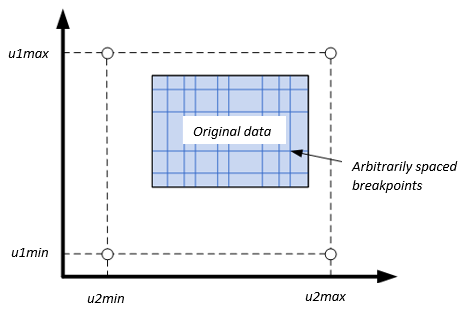
Данные для Corresponding d-axis current, id и интерполяционных таблиц Corresponding q-axis current, iq являются функциями потока q-оси и d-.
Чтобы включить текущие вычисления, подходящие для целей генерации кода, которые ограничивают память, выберите Enable memory optimized 2D LUT. Блок использует линейную интерполяцию, чтобы оптимизировать текущие значения интерполяционной таблицы для генерации кода. Эта таблица суммирует реализацию оптимизации.
| Вариант использования | Реализация | |
|---|---|---|
поток d-и q-оси выравнивается со значениями точки останова интерполяционной таблицы. | Оптимизированный памятью ток является текущим значением интерполяционной таблицы на пересечении значений потока. | |
поток d-и q-оси не выравнивается со значениями точки останова интерполяционной таблицы, но в области значений. | Оптимизированный памятью ток является линейной интерполяцией между соответствующими значениями потока. | |
поток d-и q-оси не выравнивается со значениями точки останова интерполяционной таблицы и вне области значений. | Не может вычислить оптимизированный памятью ток. Блокируйтесь использование экстраполировало данные. | |
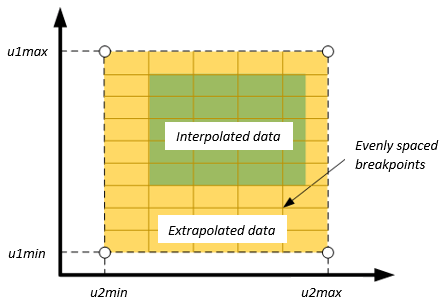
Интерполяционные таблицы, оптимизированные для генерации кода, не поддерживают экстраполяцию для данных, которые являются вне области значений. Однако можно включать предварительно вычисленные значения экстраполяции в интерполяционную таблицу потерь мощности путем выбора Specify Extrapolation.
Блок использует параметры конечной точки, чтобы изменить размер табличных данных.
| Ввод данных пользователем | Экстраполяция |
|---|---|
|
|
[1] Ху, Dakai, Yazan Alsmadi и Луня Сюй. “Высокое качество нелинейное моделирование IPM на основе измеренного статора извилистое потокосцепление”. IEEE® Транзакции на промышленных приложениях, издании 51, № 4, июль/август 2015.
[2] Чен, Сяо, Джиэбин Ван, Bhaskar Сенатор, Панайотис Лазари, Tianfu Sun. “Высокочастотная и В вычислительном отношении Эффективная Модель для Внутренних Машин Постоянного магнита, Рассматривая Магнитное Насыщение, Пространственные Гармоники и Эффект Потери в железе”. Транзакции IEEE на Industrial Electronics, Издании 62, № 7, июль 2015.
[3] Оттоссон, J., М. Алэкула. “Компактное поле, ослабляющее реализацию контроллера”. Международный Симпозиум по Силовой электронике, Электрическим Дискам, Автоматизации и Движению, июль 2006.
Flux-Based PM Controller | Induction Motor | Interior PMSM | Mapped Motor | Surface Mount PMSM