Продольное движение транспортного средства мотоцикла в плоскости
Powertrain Blockset / Динамика аппарата
Vehicle Dynamics Blockset / Кузов
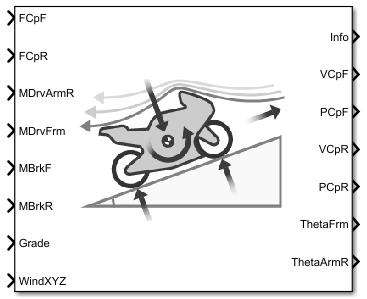
Блок Motorcycle Body Longitudinal In-Plane реализует продольную модель корпуса мотоцикла в плоскости, чтобы вычислить продольный, вертикальный, и движение тангажа. Блок составляет:
Масса системы координат, задней руки, переднего верхнего ветвления, передняя сторона понижает ветвление, переднее колесо и заднее колесо
Динамические эффекты в плоскости системы координат, передняя сторона понижает ветвление, переднее колесо, заднее колесо, заднюю подвеску, переднюю подвеску, задний демпфер колеса, заднюю руку и цепь
Внешние силы, внешние моменты и аэродинамическое перетаскивание
Дорожная наклонная поверхность
Распределение веса между осями из-за ускорения
Рассмотрите использование этого блока, чтобы представлять движение мотоцикла в трансмиссии и исследованиях экономии топлива, например, в исследованиях с тяжелым повреждением или ускорением или дорожными профилями, которые содержат большие вертикальные изменения.
Блок использует движение транспортного средства твердого тела, силы системы подвески, и ветер и силу сопротивления, чтобы вычислить силы на системы координат мотоцикла. Блок затем определяет положение и скорость мотоцикла в передних и задних закрашенных фигурах контакта.
Чтобы определить движение мотоцикла твердого тела, блок использует предназначенные для правой руки (RH) Декартовы системы систем координат, присоединенные к мотоциклу. i, j и k являются ортогональными единичными векторами, присоединенными к системам координат.
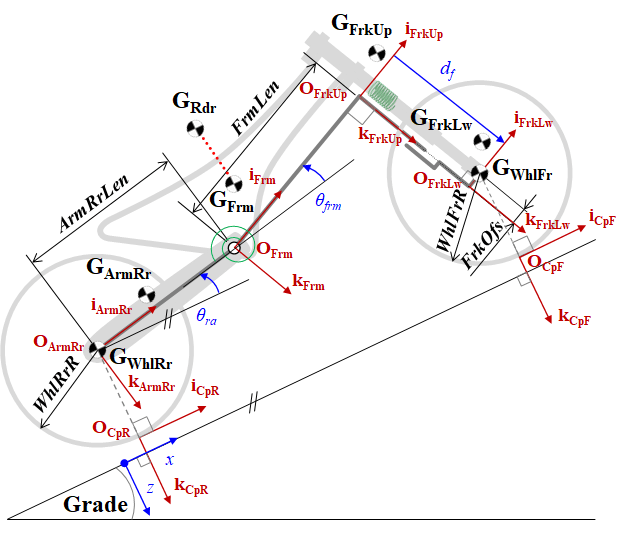
| Система координат | Переменная в фигуре | Описание |
|---|---|---|
| Дорога | x, z | Зафиксированная дорогой система координат. x приезжает дорожный класс, и z указывает вниз. |
Мотоцикл основная система координат
| OFrm | Основная система координат |
GFrm | Центр массы (CM) основной системы координат относительно OFrm, вдоль iFrm и kFrm, соответственно | |
GRdr | CM наездника относительно OFrm, вдоль iFrm и kFrm, соответственно | |
ϴfrm | Основное вращение системы координат вокруг jFrm | |
Верхнее ветвление
| OFrkUp | Верхний источник ветвления |
GFrkUp | CM верхнего ветвления относительно OFrkUp, вдоль iFrkUp и kFrkUp, соответственно | |
Более низкое ветвление
| OFrkLw | Более низкий источник ветвления |
GFrkLw | CM более низкого ветвления относительно OFrkLw, вдоль iFrkLw и kFrkLw, соответственно | |
Задняя рука
| OArmRr | Задний источник руки |
GArmRr | CM задней руки относительно OArmRr, вдоль iArmRr и kArmRr, соответственно | |
ϴra | Заднее вращение руки вокруг jArmRr | |
Передняя закрашенная фигура контакта колеса
| OCpF | Передний контакт колеса исправляет источник |
Задняя закрашенная фигура контакта колеса
| OCpR | Задний контакт колеса исправляет источник |
Используйте параметры в этой таблице, чтобы задать геометрическое размещение вашего мотоцикла.
| Параметр | Переменная в фигуре | ||
|---|---|---|---|
Initial conditions | Position | Rear contact patch longitudinal coordinate, CpRrX0 | OCpR относительно зафиксированной дорогой системы координат, вдоль |
Rear contact patch vertical coordinate, CpRrZ0 | OCpR относительно зафиксированной дорогой системы координат, вдоль | ||
Pitch angle of rear arm, ArmRrAng0 | θra | ||
Pitch angle of main frame, FrmAng0 | θFrm | ||
Fork length, FrkFrL0 | df | ||
Frame | Center of mass location, FrmCmPxz | GFrm относительно OFrm, вдоль iFrm и kFrm, соответственно | |
Length, FrmLen | FrmLen | ||
Rider | Center of mass location, RdrCmPxz | GRdr относительно OFrm, вдоль iFrm и kFrm, соответственно | |
Front Fork | Upper | Position, FrkUpCmPxz | GFrkUp относительно OFrkUp, вдоль iFrkUp и kFrkUp, соответственно |
Offset, FrkOfs | FrkOfs | ||
| Lower | Position, FrkLwCmPxz | GFrkLw относительно OFrkLw, вдоль iFrkLw и kFrkLw, соответственно | |
Rear Arm | Position, ArmRrCmPxz | GArmRr относительно OArmRr, вдоль iArmRr и kArmRr, соответственно | |
Length, ArmRrLen | ArmRrLen | ||
Wheels | Front | Radius, WhlFrR | WhlFrR |
| Rear | Radius, WhlRrR | WhlRrR | |
Suspension | Front | Equilibrium length, FrkLwL0 | df |
| Rear | Equilibrium angle, ShkRrAng0 | θFrm | |
Можно использовать эти параметры блоков, чтобы создать дополнительные входные порты. Эта таблица суммирует настройки.
Параметр панели входных сигналов | Input port | Описание |
|---|---|---|
| External forces | FExt | Внешние продольные и вертикальные силы прикладываются в эквивалентном наезднике и центре мотоцикла массы (CM). |
| External moments |
| Внешний момент об эквивалентном наезднике и CM мотоцикла, например, момент из-за наездника физическое движение. |
| External front wheel moment | MWhlF | Внешний момент в переднем колесе GWhlFr, например, двигатели колеса и внешние неустойчивые связанные с трением воздействия. |
| External rear wheel moment |
| Внешний момент в заднем колесе GWhlRr, например, двигатели колеса и внешние неустойчивые связанные с трением воздействия. |
Grade angle |
| Дорожный угол класса. |
Wind velocity |
| Скорость ветра. |
Ambient temperature | Temp | Температура окружающего воздуха. Рассмотрите эту возможность, если вы хотите варьироваться температура во время времени выполнения. |
Используйте параметр Suspension type, чтобы задать тип приостановки.
Установка | Описание |
|---|---|
| Блок моделирует силу приостановки и момент как система пружинного демпфера:
|
User-defined | Введите силу приостановки и момент:
|
Блок вычитает скорости ветра из скоростных компонентов транспортного средства, чтобы получить сетевую относительную скорость полета. Чтобы вычислить силу сопротивления и моменты, действуя на мотоцикл, блок использует сетевую относительную скорость полета.
Блок составляет переданную степень, не переданный и сохраненный.
| Сигнал шины | Описание | ||
|---|---|---|---|
|
|
| Механическая энергия от продольной внешней силы |
| Механическая энергия от вертикальной внешней силы | ||
| Механическая энергия с внешнего момента тангажа | ||
|
|
| Потеря механической энергии от продольной силы сопротивления | |
| Потеря механической энергии от вертикального лифта | ||
| Потеря механической энергии с момента тангажа перетаскивает | ||
|
|
| Изменение уровня в гравитационной потенциальной энергии | |
| Скорость изменения продольной кинетической энергии | ||
| Скорость изменения вертикальной кинетической энергии | ||
| Скорость изменения вращательного тангажа кинетическая энергия | ||
| Сохраненная пружинная энергия от передней подвески | ||
| Сохраненная пружинная энергия от задней подвески | ||
Suspension type — Тип приостановкиSimple (значение по умолчанию) | User-definedИспользуйте параметр Suspension type, чтобы задать тип приостановки.
Установка | Описание |
|---|---|
| Блок моделирует силу приостановки и момент как система пружинного демпфера:
|
User-defined | Введите силу приостановки и момент:
|
External forces — FExt входной портoff (значение по умолчанию) | onЗадайте, чтобы создать входной порт FExt.
External moments — MExt входной портoff (значение по умолчанию) | onЗадайте, чтобы создать входной порт MExt.
External front wheel moment — MWhlF входной портoff (значение по умолчанию) | onЗадайте, чтобы создать входной порт MWhlF. Рассмотрите использование этого порта, чтобы ввести внешние моменты, такие как двигатели колеса и внешние неустойчивые связанные с трением воздействия.
External rear wheel moment — MWhlR входной портoff (значение по умолчанию) | onЗадайте, чтобы создать входной порт MWhlR. Рассмотрите использование этого порта, чтобы ввести внешние моменты, такие как двигатели колеса и внешние неустойчивые связанные с трением воздействия.
Grade angle — Grade входной портon (значение по умолчанию) | offЗадайте, чтобы создать входной порт Grade.
Wind velocity — WindXYZ входной портon (значение по умолчанию) | offЗадайте, чтобы создать входной порт WindXYZ.
Ambient temperature — Temp входной портoff (значение по умолчанию) | onЗадайте, чтобы создать входной порт Temp.
Используйте параметры в этой таблице, чтобы задать геометрическое размещение вашего мотоцикла.
| Параметр | Переменная в фигуре | ||
|---|---|---|---|
Initial conditions | Position | Rear contact patch longitudinal coordinate, CpRrX0 | OCpR относительно зафиксированной дорогой системы координат, вдоль |
Rear contact patch vertical coordinate, CpRrZ0 | OCpR относительно зафиксированной дорогой системы координат, вдоль | ||
Pitch angle of rear arm, ArmRrAng0 | θra | ||
Pitch angle of main frame, FrmAng0 | θFrm | ||
Fork length, FrkFrL0 | df | ||
Frame | Center of mass location, FrmCmPxz | GFrm относительно OFrm, вдоль iFrm и kFrm, соответственно | |
Length, FrmLen | FrmLen | ||
Rider | Center of mass location, RdrCmPxz | GRdr относительно OFrm, вдоль iFrm и kFrm, соответственно | |
Front Fork | Upper | Position, FrkUpCmPxz | GFrkUp относительно OFrkUp, вдоль iFrkUp и kFrkUp, соответственно |
Offset, FrkOfs | FrkOfs | ||
| Lower | Position, FrkLwCmPxz | GFrkLw относительно OFrkLw, вдоль iFrkLw и kFrkLw, соответственно | |
Rear Arm | Position, ArmRrCmPxz | GArmRr относительно OArmRr, вдоль iArmRr и kArmRr, соответственно | |
Length, ArmRrLen | ArmRrLen | ||
Wheels | Front | Radius, WhlFrR | WhlFrR |
| Rear | Radius, WhlRrR | WhlRrR | |
Suspension | Front | Equilibrium length, FrkLwL0 | df |
| Rear | Equilibrium angle, ShkRrAng0 | θFrm | |
Система координат
Center of mass location, FrmCmPxz — Структурируйте местоположениеvectorЦентр массового местоположения системы координат, GFrm. Заданный как вектор относительно OFrm, вдоль iFrm и kFrm, соответственно.
Mass, FrmMass — Масса системы координатscalarСтруктурируйте массу, FrmMass, в kg.
Mass moment of inertia, FrmIyy — Структурируйте инерциюscalarМассовый момент инерции, FrmIyy, в kg · m2.
Length, FrmLen — Структурируйте длинуscalarДлина системы координат, FrmLen, в m.
Center of mass location, RdrCmPxz — Местоположение наездникаvectorЦентр массового местоположения наездника, GRdr. Заданный как вектор относительно OFrm, вдоль iFrm и kFrm, соответственно.
Mass, RdrMass — Масса наездникаscalarМасса наездника, RdrMass, в kg.
Mass moment of inertia, RdrIyy — Инерция наездникаscalarМомент массы наездника инерции, RdrIyy, в kg · m2.
Position, FrkUpCmPxz — Верхнее расположение ветвленияvectorЦентр массового местоположения верхнего ветвления, GFrkUp. Заданный как вектор относительно OFrkUp, вдоль iFrkUp и kFrkUp, соответственно.
Mass, FrkUpMass — Верхняя масса ветвленияscalarВерхняя масса ветвления, FrkUpMass, в kg.
Mass moment of inertia, FrmIyy — Верхняя инерция ветвленияscalarВерхний момент массы ветвления инерции, FrkUpIyy, в kg · m2.
Offset, FrkOfs — Верхнее ветвление возмещеноscalarВерхнее смещение ветвления, FrkOfs, в m.
Position, FrkLwCmPxz — Более низкое место ветвленияvectorЦентр массового местоположения более низкого ветвления, GFrkLw. Заданный как вектор относительно OFrkLw, вдоль iFrkLw и kFrkLw, соответственно.
Mass, FrkLwMass — Более низкая масса ветвленияscalarБолее низкая масса ветвления, FrkLwMass, в kg.
Mass moment of inertia, FrkLwIyy — Более низкая инерция ветвленияscalarБолее низкий момент массы ветвления инерции, FrkLwIyy, в kg · m2.
Position, ArmRrCmPxz — Заднее расположение рукиvectorЦентр массового местоположения задней руки, GArmRr. Заданный как вектор относительно OArmRr, вдоль iArmRr и kArmRr, соответственно.
Mass, ArmRrMass — Задняя масса рукиscalarЗадняя масса руки, ArmRrMass, в kg.
Mass moment of inertia, ArmRrIyy — Задняя инерция рукиscalarЗадний момент массы руки инерции, ArmRrIyy, в kg · m2.
Length, ArmRrLen — Задняя длина рукиscalarЗадняя длина руки, ArmRrLen, в m.
Mass, WhlFrMass — Передняя масса колесаscalarПередняя масса колеса, WhlFrMass, в kg.
Radius, WhlFrR — Передний радиус колесаscalarПередний радиус колеса, WhlFrR, в m.
Mass, WhlRrMass — Задняя масса колесаscalarЗадняя масса колеса, WhlRrMass, в kg.
Radius, WhlRrR — Задний радиус колесаscalarЗадний радиус колеса, WhlRrR, в m.
Stiffness, SuspFrK — Жесткость передней подвески25e3 (значение по умолчанию) | scalarЖесткость передней подвески в OFrkUp, вдоль kFrkUp, в N/m.
Damping, SuspFrC — Затухание передней подвескиscalarЗатухание передней подвески, в OFrkUp, вдоль kFrkUp, в N · s/m.
Equilibrium length, FrkLwL0 — Продолжительность равновесия передней подвескиscalarПродолжительность равновесия передней подвески, df, в m.
Stiffness, SuspRrK — Задняя жесткость приостановки рукиscalarЗадняя жесткость приостановки руки в OArmRr, о jArmRr, в N/rad.
Damping, SuspRrC — Заднее затухание приостановки рукиscalarЗаднее затухание приостановки руки в OArmRr, о jArmRr, в N · s/rad.
Equilibrium angle, ShkRrAng0 — Угол равновесия задней подвескиscalarУгол равновесия задней подвески, θFrm, в рад.
Longitudinal drag area, Af областьscalarЭффективная площадь поперечного сечения транспортного средства, Af, чтобы вычислить аэродинамическую силу сопротивления на транспортное средство, в m2.
Longitudinal drag coefficient, Cd — ПеретащитьscalarКоэффициент аэродинамического сопротивления, Cd, безразмерный.
Longitudinal lift coefficient, Cl — ЛифтscalarВоздушный коэффициент лифта, Cl, безразмерный.
Longitudinal drag pitch moment, Cpm — Сделайте подачу перетаскиваютscalarПродольный коэффициент момента тангажа перетаскивания, Cpm, безразмерный.
Pitch moment length, Lcpm — Сделайте подачу перетаскиваютscalarПередайте продолжительность момента, Lcpm, в m.
Gravitational acceleration, g — Сила тяжестиscalarГравитационное ускорение, g, в m/s2.
Absolute air pressure, Pabs — ДавлениеscalarЭкологический воздух абсолютное давление, Pabs, в Па.
Air temperature, Tair — Температура окружающего воздухаscalarТемпература окружающего воздуха, Tair, в K.
Чтобы включить этот параметр, очистите Ambient temperature.
Rear contact patch longitudinal coordinate, CpRrX0 — Продольная координатаscalarЗадняя закрашенная фигура контакта продольная координата, OCpR, относительно зафиксированной дорогой системы координат, вдоль x, в m.
Rear contact patch vertical coordinate, CpRrZ0 — Вертикальная координатаscalarЗадняя вертикальная координата закрашенной фигуры контакта, OCpR, относительно зафиксированной дорогой системы координат, вдоль z, в m.
Pitch angle of rear arm, ArmRrAng0 — Задний угол рукиscalarПередайте угол задней руки, θra, в рад.
Pitch angle of main frame, FrmAng0 — Угловая длинаscalarПередайте угол основной системы координат, θFrm, в рад.
Fork length, FrkFrL0 — Продолжительность ветвленияscalarПродолжительность ветвления, df, в m.
Longitudinal velocity of rear contact patch — Продольная скоростьscalarЗадняя закрашенная фигура контакта продольная координата, , относительно зафиксированной дорогой системы координат, вдоль x, в m/s.
Vertical velocity of rear contact patch, CpRrVz0 — Вертикальная скоростьscalarВертикальная скорость задней закрашенной фигуры контакта, , относительно зафиксированной дорогой системы координат, вдоль z, в m/s.
Pitch rate of rear arm, ArmRrAngV0 — Передайте уровеньscalarПередайте уровень задней руки, , в rad/s.
Pitch rate of main frame, FrmAngV0 — Передайте уровеньscalarПередайте уровень основной системы координат, , в rad/s.
Lower fork deformation velocity, FrkLwV0 — Скорость деформацииscalarБолее низкая скорость деформации ветвления, , в m/s.
[1] Гинер, Дэвид Морено. “Символьно-числовые Инструменты для Анализа Динамики Мотоцикла. Разработка Виртуального Наездника для Мотоциклов На основе Прогнозирующего Управления Модели”. Доктор философии diss., Универсидад Мигель Эрнандес де Эльче, 2016.
