Реализуйте цепь мотоцикла
Powertrain Blockset / Ходовая часть / Связи
Vehicle Dynamics Blockset / Трансмиссия / Ходовая часть / Связи
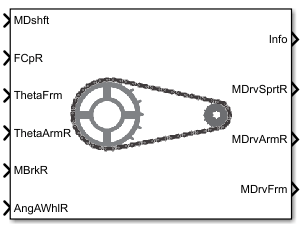
Блок Motorcycle Chain реализует динамические эффекты цепи мотоцикла на блоке Motorcycle Body Longitudinal In-Plane, включая динамическое напряжение и связь диска момента.
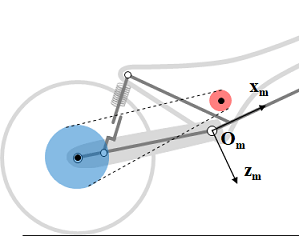
Этот рисунок показывает, как цепь имеет отношение геометрически к системе координат мотоцикла, задней руке и заднему колесу.
| Система координат | Переменная в фигуре | Описание |
|---|---|---|
Мотоцикл основная система координат
| Om | Основная система координат |
Этот рисунок показывает, как цепь имеет отношение геометрически к системе координат мотоцикла, задней руке и заднему колесу.
Coordinates, SprktFrPxz — Переднее положение звездочкиvectorПоложение передней звездочки, SprktFrPxz, вдоль xm zm, соответственно, в m.
Mass moment of inertia, SprktFrIyy — Передняя инерция звездочкиscalarПередний момент массы звездочки инерции, SprktFrIyy, в kg · m2.
Radius, SprktFrR — Передний радиус звездочкиscalarПередний радиус звездочки, SprktFrR, в m.
Mass moment of inertia, SprktRrIyy — Задняя инерция звездочкиscalarЗадний момент массы звездочки инерции, SprktRrIyy, в kg · m2.
Radius, SprktRrR — Задний радиус звездочкиscalarЗадний радиус звездочки, SprktRrR, в m.
Mass moment of inertia, WhlRrIyy — Задняя инерция колесаscalarЗадний момент массы колеса инерции, WhlRrIyy, в kg · m2.
Radius, WhlRrR — Задний радиус колесаscalarЗадний радиус колеса, WhlRrR, в m.
Arm length, ArmRrLen — Длина руки SwingscalarДлина руки, ArmRrLen, в m.
Stiffness, WhlDmpK — Жесткость демпфера колеса1e4 (значение по умолчанию) | scalarЖесткость демпфера колеса, WhlDmpK, в N/rad.
Damping, WhlDmpC — Затухание колеса1e2 (значение по умолчанию) | scalarЗатухание демпфера колеса, WhlDmpC, в N · s/rad.
Equilibrium angle — Угол равновесия демпфера колеса-15e-3 (значение по умолчанию) | scalarУгол равновесия, WhlDmpAng0, в рад.
Rear sprocket angular velocity, SprktRrAngV0 — Скорость вращенияscalarЗадняя скорость вращения звездочки, SprktRrAngV0, в rad/s.
Rear wheel angular velocity, WhlRrAngV0 — Скорость вращенияscalarЗадняя скорость вращения колеса, WhlRrAngV0, в rad/s.
[1] Гинер, Дэвид Морено. “Символьно-числовые Инструменты для Анализа Динамики Мотоцикла. Разработка Виртуального Наездника для Мотоциклов На основе Прогнозирующего Управления Модели”. Доктор философии diss., Универсидад Мигель Эрнандес де Эльче, 2016.
