В этом примере показано, как использовать блок Drive Cycle Source, чтобы идентифицировать, что ездовой цикл дает сбой, когда вы запускаете приложение готовых узлов автомобиля с бензиновым двигателем с FTP–75 ездовой цикл.
Откройте проект примера готовых узлов автомобиля с бензиновым двигателем. По умолчанию приложение имеет FTP–75 ездовой цикл с ошибочным отключенным отслеживанием.
Откройте блок Drive Cycle Source. На вкладке Fault Tracking выберите эти параметры:
Enable fault tracking
Enable failure tracking
Рассмотрите параметры, которые задают условия отказа и отказ. Если скорость транспортного средства не в допустимой области значений скорости во время допуска времени, блок устанавливает условие отказа. Примите динамометр EPA по умолчанию, управляющий установками параметров расписания путем нажатия на OK.
Эта таблица обеспечивает настройки для стандарта EPA и Глобальной Согласованной Процедуры тестирования Легкового автомобиля (WLTP) лабораторные испытания.
| Параметр | Описание | Установка | |
|---|---|---|---|
Стандарт EPA1 | Тесты WLTP2 | ||
Speed tolerance | Допуск скорости выше самой высокой точки и ниже самой низкой точки скорости ездового цикла прослеживает в допуске времени. | 2,0 мили в час | 2,0 км/ч |
Time tolerance | Время, когда использование блока, чтобы определить допуск скорости. | 1,0 с | 1,0 с |
| Maximum number of faults | Максимальное количество отказов во время ездового цикла. | Не заданный | 10 |
| Maximum single fault time | Максимальная длительность отказа. | 2,0 с | 1,0 с |
| Maximum total fault time | Максимальное накопленное время проведено при условии отказа. | Не заданный | Не заданный |
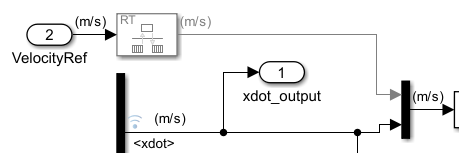
Соедините транспортное средство продольный скоростной сигнал с блоком Drive Cycle Source VelFdbk входной порт.
В подсистеме Визуализации соедините продольный скоростной сигнал, <xdot>, к Выходному порту под названием xdot_output.
Определите <xdot> модули сигнала. Чтобы отобразить модули сигнала, на вкладке Debug, выбирают Information Overlays> Units. <xdot> модули сигнала являются m/s.
Выберите <xdot> сигнальная линия и Enable Data Logging.
На верхнем уровне модели соедините Visualization выход с входом Исходного блока Ездового цикла.
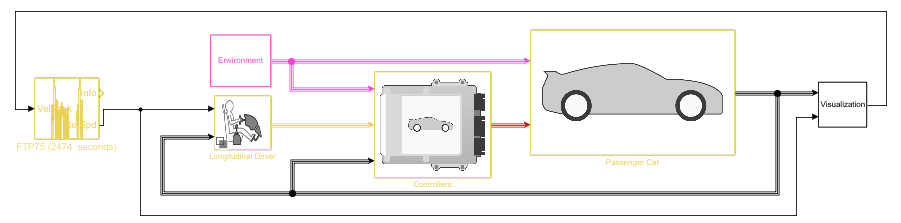
Соедините блок Drive Cycle Source Info выходной порт к порту Terminator. Включите регистрацию данных.
Сохраните модель и запустите симуляцию.
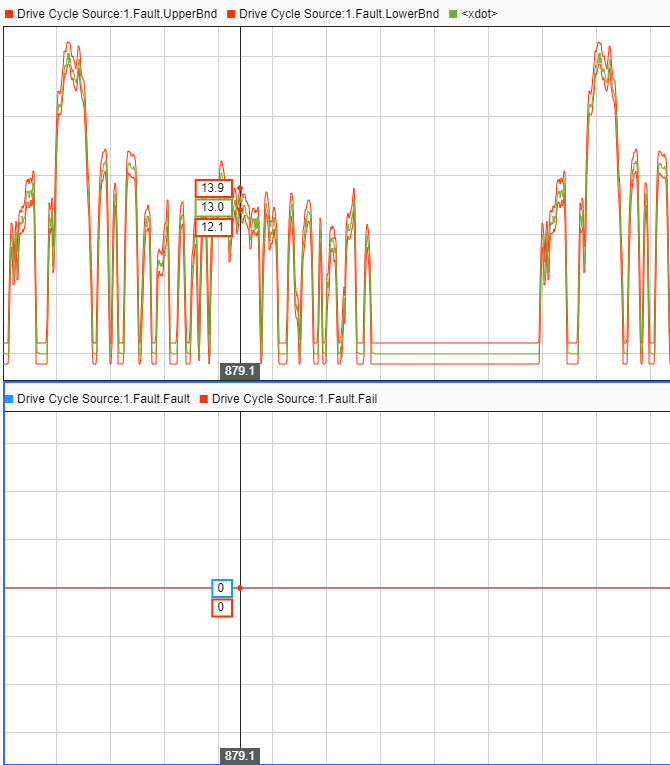
Чтобы смотреть результаты, используйте Data Inspector. В Simulink® Панель инструментов, на вкладке Simulation, под Review Results, нажимает Data Inspector.
Эти результаты показывают, что блок Drive Cycle Source не обнаружил отказы или отказы во время ездового цикла.
Fault — Скорость транспортного средства, <xdot>, оставшийся в верхних и нижних границах допустимой области значений скорости.
Fail — Условия отказа не превысили максимальное количество отказов, максимальное время одиночного отказа или максимальное общее время отказа.
В блоке Drive Cycle Source, установленном параметр Speed tolerance на более трудный допуск, например, 1 миля в час. Блок вычисляет новые ошибочные границы для скорости.
Повторно выполните симуляцию.
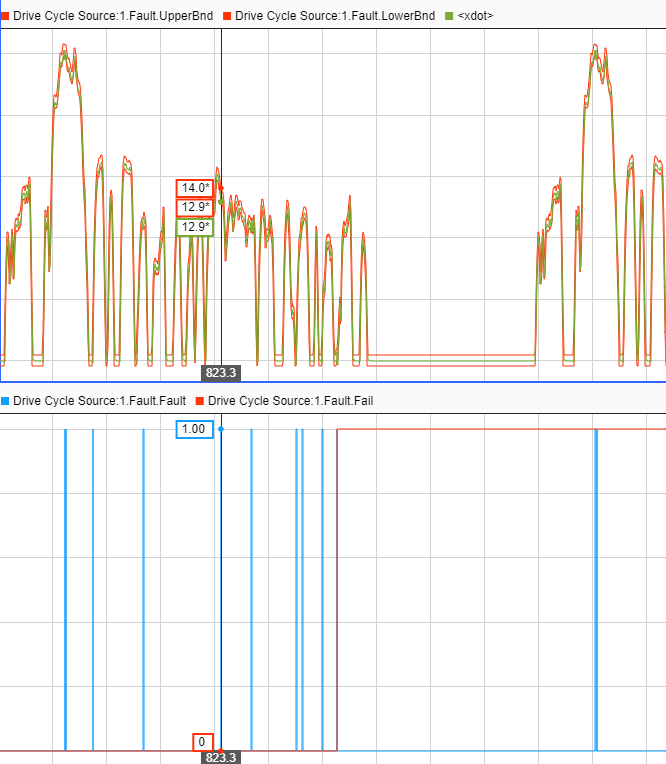
Чтобы смотреть результаты, используйте Data Inspector. Эти результаты показывают, что Исходный блок Ездового цикла действительно обнаруживал отказы и отказы во время ездового цикла.
Fault — Скорость транспортного средства, <xdot>, не остался в верхних и нижних границах допустимой области значений скорости.
Fail — Условия отказа превысили максимальное количество отказов, максимальное время одиночного отказа или максимальное общее время отказа.
[1] Агентство по охране окружающей среды (EPA). EPA городское расписание управления динамометра. 40 CFR 86.115-78, 1 июля 2001.
[2] Комиссия Европейского союза. "Скорость прослеживает допуски". Регулирование Комиссии Европейского союза. 32017R1151, Секунда 1.2.6.6, 1 июня 2017.
