График корневого годографа динамической системы
rlocus( вычисляет и строит корневой годограф модели SISO sys)sys. Корневой годограф возвращает траектории полюса с обратной связью в зависимости от усиления обратной связи k (принимающий отрицательную обратную связь). Корневые годографы используются, чтобы изучить эффекты изменяния усилений обратной связи на местоположениях полюса с обратной связью. В свою очередь эти местоположения предоставляют косвенную информацию о времени и частотных характеристиках.
Можно использовать rlocus построить схему корневого годографа любого из следующих циклов отрицательной обратной связи установкой sys как показано ниже:
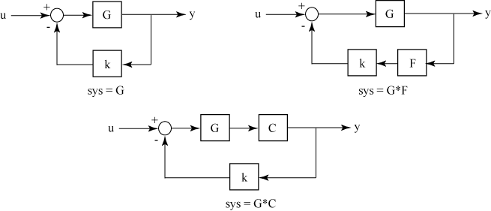
Например, если sys передаточная функция, представленная
полюса с обратной связью являются корнями
График корневого годографа изображает траектории полюсов с обратной связью когда усиление обратной связи k варьируется от 0 до бесконечности. rlocus адаптивно выбирает набор положительных усилений k произвести сглаженный график. Полюса на графике корневого годографа обозначаются x и нули обозначаются o.
rlocus(sys1,sys2,...) строит корневые годографы нескольких моделей LTI sys1, sys2,... на одном графике. Можно задать цвет, стиль линии и маркер для каждой модели. Еще для большего количества опций настройки графика смотрите rlocusplot.
Для этого примера. постройте корневой годограф следующей динамической системы SISO:
sys = tf([2 5 1],[1 2 3]); rlocus(sys)

Полюса системы обозначаются x, в то время как нули обозначаются o на графике корневого годографа. Можно использовать меню в рамках сгенерированного графика корневого годографа добавить линии сетки, увеличение или, и также вызвать Property Editor, чтобы настроить график.
Для большего количества опций настройки графика используйте rlocusplot.
В данном примере рассмотрите sisoModels.mat который содержит следующие три модели SISO:
sys1 модель передаточной функции
sys2 модель в пространстве состояний
sys3 модель нулей, полюсов и усиления
Загрузите модели от mat файл.
load('sisoModels.mat','sys1','sys2','sys3');
Создайте график корневого годографа с помощью rlocus и задайте цвет для каждой системы. Также добавьте легенду в график корневого годографа.
rlocus(sys1,'b',sys2,'k',sys3,'r') hold on legend('sys1','sys2','sys3') hold off

Фигура содержит схемы корневого годографа для всех трех систем в том же графике. Для большего количества индивидуальной настройки графика смотрите rlocusplot.
В данном примере рассмотрите следующую модель передаточной функции SISO:
Используйте вышеупомянутую модель передаточной функции с rlocus чтобы извлечь полюса с обратной связью и сопоставленную обратную связь получают значения.
sys = tf([3 1],[9 7 5 6]); [r,k] = rlocus(sys)
r = 3×53 complex
-0.9406 + 0.0000i -0.8744 + 0.0000i -0.8685 + 0.0000i -0.8620 + 0.0000i -0.8550 + 0.0000i -0.8475 + 0.0000i -0.8394 + 0.0000i -0.8306 + 0.0000i -0.8212 + 0.0000i -0.8111 + 0.0000i -0.8003 + 0.0000i -0.7888 + 0.0000i -0.7766 + 0.0000i -0.7636 + 0.0000i -0.7500 + 0.0000i -0.7358 + 0.0000i -0.7209 + 0.0000i -0.7055 + 0.0000i -0.6896 + 0.0000i -0.6734 + 0.0000i -0.6569 + 0.0000i -0.6402 + 0.0000i -0.6236 + 0.0000i -0.6071 + 0.0000i -0.5908 + 0.0000i -0.5748 + 0.0000i -0.5593 + 0.0000i -0.5443 + 0.0000i -0.5299 + 0.0000i -0.5161 + 0.0000i -0.5030 + 0.0000i -0.4906 + 0.0000i -0.4789 + 0.0000i -0.4679 + 0.0000i -0.4576 + 0.0000i -0.4480 + 0.0000i -0.4390 + 0.0000i -0.4306 + 0.0000i -0.4229 + 0.0000i -0.4157 + 0.0000i -0.4090 + 0.0000i -0.4029 + 0.0000i -0.3972 + 0.0000i -0.3919 + 0.0000i -0.3871 + 0.0000i -0.3826 + 0.0000i -0.3785 + 0.0000i -0.3748 + 0.0000i -0.3713 + 0.0000i -0.3681 + 0.0000i
0.0814 + 0.8379i 0.0483 + 0.9140i 0.0453 + 0.9212i 0.0421 + 0.9291i 0.0386 + 0.9377i 0.0349 + 0.9470i 0.0308 + 0.9573i 0.0264 + 0.9686i 0.0217 + 0.9809i 0.0167 + 0.9943i 0.0113 + 1.0090i 0.0055 + 1.0251i -0.0006 + 1.0426i -0.0071 + 1.0617i -0.0139 + 1.0826i -0.0210 + 1.1053i -0.0284 + 1.1300i -0.0362 + 1.1568i -0.0441 + 1.1859i -0.0522 + 1.2175i -0.0605 + 1.2515i -0.0688 + 1.2883i -0.0771 + 1.3278i -0.0853 + 1.3703i -0.0935 + 1.4158i -0.1015 + 1.4644i -0.1092 + 1.5162i -0.1167 + 1.5714i -0.1239 + 1.6299i -0.1308 + 1.6920i -0.1374 + 1.7578i -0.1436 + 1.8273i -0.1494 + 1.9006i -0.1549 + 1.9780i -0.1601 + 2.0594i -0.1649 + 2.1452i -0.1694 + 2.2354i -0.1736 + 2.3302i -0.1775 + 2.4299i -0.1810 + 2.5345i -0.1844 + 2.6442i -0.1875 + 2.7594i -0.1903 + 2.8802i -0.1929 + 3.0069i -0.1953 + 3.1397i -0.1976 + 3.2789i -0.1996 + 3.4247i -0.2015 + 3.5775i -0.2032 + 3.7375i -0.2048 + 3.9052i
0.0814 - 0.8379i 0.0483 - 0.9140i 0.0453 - 0.9212i 0.0421 - 0.9291i 0.0386 - 0.9377i 0.0349 - 0.9470i 0.0308 - 0.9573i 0.0264 - 0.9686i 0.0217 - 0.9809i 0.0167 - 0.9943i 0.0113 - 1.0090i 0.0055 - 1.0251i -0.0006 - 1.0426i -0.0071 - 1.0617i -0.0139 - 1.0826i -0.0210 - 1.1053i -0.0284 - 1.1300i -0.0362 - 1.1568i -0.0441 - 1.1859i -0.0522 - 1.2175i -0.0605 - 1.2515i -0.0688 - 1.2883i -0.0771 - 1.3278i -0.0853 - 1.3703i -0.0935 - 1.4158i -0.1015 - 1.4644i -0.1092 - 1.5162i -0.1167 - 1.5714i -0.1239 - 1.6299i -0.1308 - 1.6920i -0.1374 - 1.7578i -0.1436 - 1.8273i -0.1494 - 1.9006i -0.1549 - 1.9780i -0.1601 - 2.0594i -0.1649 - 2.1452i -0.1694 - 2.2354i -0.1736 - 2.3302i -0.1775 - 2.4299i -0.1810 - 2.5345i -0.1844 - 2.6442i -0.1875 - 2.7594i -0.1903 - 2.8802i -0.1929 - 3.0069i -0.1953 - 3.1397i -0.1976 - 3.2789i -0.1996 - 3.4247i -0.2015 - 3.5775i -0.2032 - 3.7375i -0.2048 - 3.9052i
k = 1×53
104 ×
0 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0002 0.0002 0.0002 0.0002 0.0002 0.0003 0.0003 0.0003 0.0003 0.0004 0.0004 0.0004 0.0005 0.0005 0.0006 0.0006 0.0007 0.0007 0.0008 0.0009 0.0010 0.0011 0.0012 0.0013 0.0014 0.0015 0.0017 0.0018 0.0020 0.0022 0.0024 0.0026 0.0028 0.0031 0.0034 0.0037 0.0041 0.0045
Начиная с sys содержит 3 полюса, размер результирующего массива полюсов r 3x53. Каждый столбец в r соответствует значению усиления от векторного k. В данном примере rlocus автоматически выбрал 53 значения k от нуля до бесконечности, чтобы получить сглаженную траекторию для трех полюсов с обратной связью.
display(r(:,39))
-0.4229 + 0.0000i -0.1775 + 2.4299i -0.1775 - 2.4299i
display(k(39))
16.5907
Например, r(:,39) содержит вышеупомянутые полюса с обратной связью для значения усиления обратной связи 16,5907.
В данном примере рассмотрите следующую модель передаточной функции SISO:
Задайте модель передаточной функции и требуемый вектор из значений усиления обратной связи. В данном примере рассмотрите набор значений усиления, варьирующихся от 1 до 8 с шагом 0,5, и извлеките местоположения полюса с обратной связью с помощью rlocus.
sys = tf([0.5 -1],[4 0 3 0 2]); k = (1:0.5:5); r = rlocus(sys,k); size(r)
ans = 1×2
4 9
Начиная с sys содержит 4 полюса с обратной связью, размер результирующего массива закрытых полюсных местоположений r 4x9, где эти 9 столбцов соответствуют 9 определенным значениям усиления, заданным в k.
Можно также визуализировать траекторию полюсов с обратной связью для определенных значений усиления в k на графике корневого годографа.
rlocus(sys,k)

Для интерактивного подхода к графическому выводу корневого годографа смотрите Control System Designer.
rlocusplot | tf | pole | zero | ss | zpk | Control System Designer
