Настраиваемые модели Generalized LTI представляют системы, фиксирующие и и настраиваемый (или параметрический) коэффициенты.
Можно использовать настраиваемые модели Generalized LTI для:
Смоделируйте настраиваемое (или параметрический) компонент системы управления, такой как настраиваемый фильтр lowpass.
Смоделируйте систему управления, которая содержит обоих:
Фиксированные компоненты, такие как динамика объекта и динамика датчика
Настраиваемые компоненты, такие как фильтры и компенсаторы
Можно использовать настраиваемые модели Generalized LTI для исследований параметра. Для примера смотрите Изменение Параметра Исследования путем Выборки Настраиваемой Модели. Можно также использовать настраиваемые модели Generalized LTI для настройки фиксированных настраивающих команд использования структур управления такой как systune или приложение Control System Tuner. Смотрите Многоконтурную, Многоцелевую Настройку.
Control System Toolbox™ включает настраиваемые компоненты с предопределенной структурой под названием Блоки Системы управления. Можно использовать настраиваемые Блоки Системы управления, чтобы смоделировать любой настраиваемый компонент, который соответствует одной из предопределенных структур.
Чтобы создать настраиваемые компоненты с определенной пользовательской структурой, которая не покрыта Блоками Системы управления:
Используйте настраиваемый действительный параметр realp или обобщенная матрица genmat представлять настраиваемые коэффициенты вашего компонента.
Используйте получившееся realp или genmat объекты как входные параметры к tf или ss смоделировать компонент. Результатом является обобщенное пространство состояний (genss) модель компонента.
Для примеров создания таких пользовательских настраиваемых компонентов см.:
Создать настраиваемую модель Generalized LTI, представляющую систему управления и зафиксированными и настраиваемыми компонентами:
Смоделируйте ненастраиваемые компоненты своей системы с помощью числовых моделей LTI.
Модель каждая настраиваемая Система управления использования компонента Блоки или выражения, включающие такие блоки. Смотрите Моделирующие Настраиваемые Компоненты.
Используйте команды соединения моделей такой как series, parallel или connect, или арифметические операторы +, -, *, /, \, и ^, объединить все компоненты вашей системы.
Получившаяся модель:
A genss модель, если ни один из ненастраиваемых компонентов не модель данных частотной характеристики (например, frd)
A genfrd модель, если ненастраиваемый компонент является a frd модель
Для примера построения a genss модель системы управления и с зафиксированными и с настраиваемыми компонентами, смотрите Систему управления с Настраиваемыми Компонентами.
Модель Generalized отдельно хранит числовые и параметрические фрагменты модели путем структурирования модели в Standard Form, как показано на следующем рисунке.
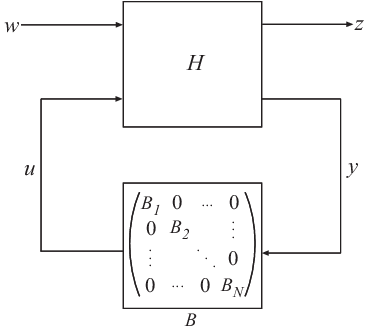
w и z представляют вводы и выводы модели Generalized.
H представляет все фрагменты модели Generalized, которые зафиксировали (непараметрические) коэффициенты. H:
Пространство состояний (ss) модель, для genss модели
Данные о частотной характеристике (frd) модель, для genfrd модели
Матрица A, для genmat модели
B представляет параметрические компоненты модели Generalized, которые являются Блоками Системы управления B 1 ... , BN. Blocks свойство модели Generalized хранит список имен этих блоков. Если модель Generalized имеет блоки, которые происходят многократно в B 1 ... , BN, они только перечислены однажды в Blocks свойство.
Получить доступ к внутреннему представлению модели Generalized, включая H и B, используйте getLFTModel команда.
Эта Стандартная Форма может представлять любую структуру управления. Чтобы понять почему, рассмотрите структуру управления как агрегацию элементов фиксированного коэффициента, взаимодействующих с параметрическими элементами:
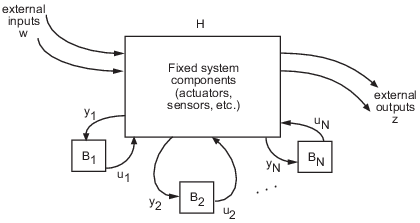
Чтобы переписать это в Стандартной Форме, задать
и группа настраиваемые элементы управления B 1 ... , BN в диагональную блоком настройку C. P включает все фиксированные компоненты архитектуры управления — приводы, датчики, и другие ненастраиваемые элементы — и их соединений.
