В системе слежения датчики используются, чтобы сгенерировать измерения или обнаружения от целей в среде. Датчики обычно имеют апертуру, которой они прерывают энергию, которая предназначается, или испустите или отразитесь. Датчики, в основном, используют прерванную энергию получить информацию о состоянии и атрибутах целей.
Датчик является активным датчиком, если прерванная энергия происходит из себя, такие как моностатический радар или моностатический гидролокатор. Датчик является пассивным датчиком, если прерванная энергия происходит из внешнего источника, такого как инфракрасное излучение (IR) датчик, который получает излученную энергию от цели.
Кроме получения энергии целей, апертура неизбежно также собирает вмешивающуюся энергию, созданную любой по своей природе (такую как фоновая помеха) или человеком (таким как создающий затор сигнал). Поэтому качество обнаружения датчиков включает много факторов, таких как точность, разрешение, смещение и ложные предупреждения. Кроме того, также важно рассмотреть обнаружительную способность датчиков, которая использует факторы, такие как сканирование пределов, поля зрения и датчика, монтирующегося в проекте системы слежения.
Это введение в основном обсуждает радар (включая fusionRadarSensor и radarEmitter объекты), но некоторые следующие описания также применяются к другим типам датчиков (включая irSensor, sonarSensor, и sonarEmitter объекты.
Радар использует сигналы радиоволны, отраженные или испускаемые от цели, чтобы обнаружить цель. Учитывая различные настройки передатчика и приемника, радар может иметь один из трех режимов обнаружения: моностатические, бистатические, или электронные меры по поддержке (ESM).
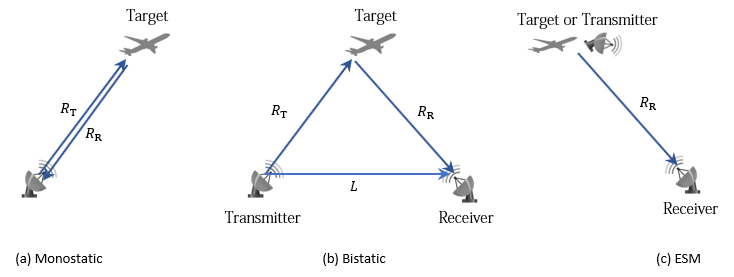
Для моностатического режима обнаружения передатчик и приемник расположены, как показано на рисунке (a). В этом режиме измерение области значений R может быть описан как R = R T = R R, где R T и R R являются расстояниями от передатчика до цели и с цели на приемник, соответственно. В этом режиме измерением области значений является R = c t/2, где c является скоростью света, и t является общим прошедшим временем передачи сигнала. В дополнение к измерению области значений моностатический датчик может также опционально сообщить об уровне области значений, азимуте и измерениях вертикального изменения цели.
Для бистатического режима обнаружения передатчик и приемник разделяются расстоянием L. Как показано на рисунке (b), сигнал испускается от передатчика, отраженного от цели, и в конечном счете полученного приемником. Бистатическое измерение области значений R b задано как R b = R T + R R − L. Радарный датчик получает бистатическое измерение области значений как R b = c Δ t, где Δ t является разницей во времени между приемником, прерывающим прямой сигнал от передатчика и прерывающий отраженный сигнал от цели. В дополнение к бистатическому измерению области значений бистатический радар может опционально сообщить о бистатическом уровне области значений, азимуте и измерениях вертикального изменения цели. Поскольку бистатическая область значений и два угла подшипника (азимут и вертикальное изменение) не соответствуют тому же радиус-вектору, их нельзя объединить в радиус-вектор и сообщить в Декартовой системе координат. Без дополнительной информации бистатический датчик может только сообщить об измерениях в сферической системе координат.
Для режима обнаружения ESM приемник может только прервать сигнал, отраженный от цели или испускаемый непосредственно от передатчика, как показано на рисунке (c). Поэтому единственные доступные измерения являются азимутом и вертикальным изменением цели или передатчика. Датчик ESM сообщает об этих измерениях в сферической системе координат.
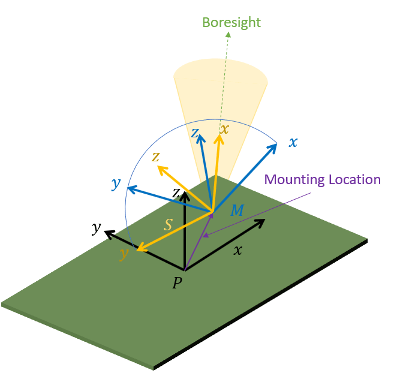
Чтобы интерпретировать обнаружение, сгенерированное радаром, необходимо изучить, как радар смонтирован на платформе. Радар, монтирующий систему координат (M) источник, может быть перемещен от системы координат платформы (P). Это перемещение обычно определяется MountingLocation свойство объекта датчика, такого как fusionRadarSensor. Радарная система координат монтирования может также угловато перемещенный от системы координат платформы. Можно определить это угловое перемещение, представленное тремя углами поворота в z-y-x последовательность с помощью MountingAngles свойство. Первоначально, радар, сканируя систему координат (S) выравнивается с его системой координат монтирования (M). Однако, когда радар начинает сканировать, радар может отсканировать вокруг z - и y - оси монтирующейся системы координат. x - направление радарной системы координат сканирования выравнивается с текущим направлением опорного направления радара.
В большинстве случаев радар работает в режиме сканирования, в котором лучи датчика развертываются назад и вперед, с шириной, равной ее полю зрения (FOV), через область пробела, заданную радарным пределом сканирования. FOV обычно - 3 децибела (дБ) радарной ширины луча. Скорость развертки задана UpdateRate свойство объекта датчика. Можно получить скорость сканирования датчика с помощью его поля зрения и частоты обновления. Например, если частота обновления составляет 20 Гц, и поле зрения является 2 градусами, то радарная скорость сканирования является 40 градусами в секунду. Для получения дополнительной информации о радарном покрытии датчика смотрите Радарный пример Настройки Режима Сканирования.
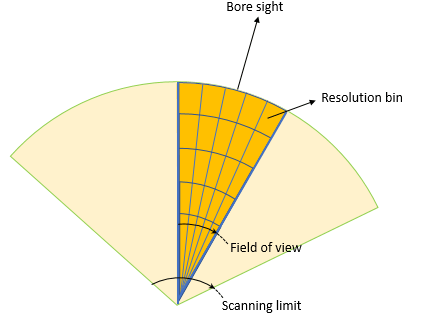
Разрешение датчика задает способность датчика различать две цели. В трехмерном пространстве интервал разрешения радара формируется контуром азимута, контуром вертикального изменения и контуром области значений. Если две цели находятся в пределах того же интервала разрешения, то радар не может различать их и сообщает о них как об одной цели в обнаружении.
Точность датчика может быть описана стандартным отклонением погрешности измерения. Точность в основном затронута двумя факторами: сигнал к шумовому отношению (ОСШ) датчика и смещение обнаружения датчика. ОСШ задан как отношение отраженной степени сигнала к шумовой мощности в децибелах (дБ). Отношение выше, чем 1:1 (больше, чем 0 дБ) указывает на большее количество сигнала, чем шум. Больший ОСШ приводит к меньшей погрешности измерения и более высокой точности. Для радара ОСШ обычно является функцией эффективной площади рассеивания (RCS) цели. Смещение датчика происходит в основном из-за несовершенного выравнивания или калибровки, и часто принимается, чтобы быть постоянным значением. В каждом радарном объекте можно задать его смещение как часть свойств использования размера интервала разрешения датчика, таких как AzimuthBiasFraction. Чем больше смещение, тем больше ошибок обнаружение включает.
Радар может также сделать неправильную оценку области наблюдения. Вероятность ложного предупреждения (FA p) представляет вероятность, что показания радара обнаружение на интервале разрешения даже при том, что интервал разрешения не занят целью. Вероятность обнаружения (P D) представляет вероятность, что показания радара обнаружение на интервале разрешения, если интервал разрешения на самом деле занят целью. Поэтому 1 – P D представляет вероятность, что цель не обнаруживается радаром. P D является в основном функцией ОСШ цели и FA p радара.
Когда радар действует в среде, где другая нежелательная эмиссия радиочастоты (RF) вмешивается в формы волны, испускаемые радаром, радар может испытать ухудшение в эффективности обнаружения в направлении вмешивающихся сигналов.
Во многих случаях радар имеет максимальную однозначную область значений и ограничения скорости области значений. Если расстояние между целью и датчиком больше максимальной однозначной области значений, то датчик переносит обнаруженную область значений в область значений [0, R макс.], где R макс. является максимальной однозначной областью значений. Например, примите область значений цели, R t больше, чем R макс., затем областью значений, о которой сообщают, цели является mod(R t, R макс.), где mod функция остатка после деления в MATLAB. В радарном объекте можно отключить это ограничение путем установки HasMaxUnabmiguousRange свойство к false.
В терминах систем слежения существует два основных класса измерений: кинематический и атрибут. Кинематические измерения предоставляют системам слежения информацию о существовании и местоположении цели. Типичные кинематические измерения включают область значений, уровень области значений, азимут и вертикальное изменение. Припишите измерения, обычно содержат идентификацию и характеристики цели, такие как форма и отражающая способность. Кинематические измерения для радара описаны здесь.
В общем случае радар может сообщить о кинематических измерениях или в системах координат сферической или в Декартовой координаты. Для сферических координат радар может сообщить об азимуте, вертикальном изменении, области значений и измерениях уровня области значений. Для Декартовых координат радар может сообщить о 2D или 3-D измерениях положения и скорости на основе настройки. Каждый радарный режим обнаружения может только вывести определенные типы измерений. Доступные координаты обнаружения для каждого режима обнаружения:
Для моностатического режима обнаружения об обнаружениях можно сообщить в системах координат сферической или Декартовой координаты.
Для бистатического режима обнаружения об обнаружениях можно только сообщить в системе координат сферической координаты, и область значений, о которой сообщают, является бистатической областью значений к цели.
Для режима обнаружения ESM об обнаружениях можно только сообщить в системе координат сферической координаты.
В Sensor Fusion and Tracking Toolbox датчик возражает выходным обнаружениям в форме objectDetection объекты. objectDetection объект содержит эти свойства:
| Свойство | Определение |
|---|---|
| Время | Время обнаружения |
| Измерение | Объектные измерения |
| Шум измерения | Измерьте шумовую ковариационную матрицу |
| SensorIndex | Уникальный идентификатор датчика |
| ObjectClassID | Уникальный идентификатор для предметной классификации |
| MeasurementParameters | Параметры раньше интерпретировали измерение, такое как настройка датчика и информация о системе координат обнаружения |
| ObjectAttributes | Дополнительная информация о цели, такой как целевой ID и ЭПР цели |
Обратите внимание на то, что MeasurementParameters свойство содержит важную информацию, используемую, чтобы интерпретировать измерения, такие как положение датчика (положение, скорость и ориентация) и координатная информация о системе координат для измерений во время обнаружения. Для получения дополнительной информации смотрите Параметры Измерения и Обнаружения Преобразования к objectDetection примеру Формата.
