Сгенерируйте отчеты дорожек и обнаружения
fusionRadarSensor Система object™ генерирует обнаружение или отчеты дорожки целей. Можно задать режим обнаружения датчика как моностатические, бистатические, или электронные меры по поддержке (ESM) через DetectionMode свойство. Можно использовать fusionRadarSensor чтобы симулировать кластеризируемые или некластеризованные обнаружения с добавленным случайным шумом, и также сгенерировать ложь предупреждают обнаружения. Можно плавить сгенерированные обнаружения с другими объектами данных датчика и отслеживаемыми объектами с помощью мультиобъектного средства отслеживания, такими как trackerGNN. Можно также вывести дорожки непосредственно от fusionRadarSensor объект. Чтобы сконфигурировать, выводятся ли цели как кластеризируемые обнаружения, некластеризованные обнаружения или дорожки, используют TargetReportFormat свойство. Можно добавить fusionRadarSensor к Platform и затем используйте радар в trackingScenario.
Используя одно-экспоненциальную модель, радар вычисляет область значений и смещения вертикального изменения, вызванные распространением через тропосферу. Смещение области значений означает, что измеренные области значений больше области значений угла обзора к цели. Смещение вертикального изменения означает, что измеренные вертикальные изменения выше их истинных вертикальных изменений. Смещения больше, когда путь угла обзора между радаром и целью проходит через более низкие высоты, потому что атмосфера является более толстой на этих высотах. Дополнительную информацию см. в Ссылках.
Сгенерировать радарное обнаружение и отчеты дорожки:
Создайте fusionRadarSensor объект и набор его свойства.
Вызовите объект с аргументами, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты?
rdr = fusionRadarSensor
rdr = fusionRadarSensor(id)id.
rdr = fusionRadarSensor(___,scanConfig)scanConfig. Можно задать scanConfig как 'No scanning', 'Raster', 'Rotator', или 'Sector'. Дополнительную информацию см. в Синтаксисах Удобства на этих настройках.
rdr = fusionRadarSensor(___,Name,Value)radarDataGenerator('TargetReportFormat','Tracks','FilterInitializationFcn',@initcvkf) создает радарный датчик, который генерирует отчеты дорожки с помощью средства отслеживания, инициализированного постоянной скоростью линейный Фильтр Калмана.
Эти синтаксисы применяются, когда вы устанавливаете DetectionMode свойство к 'Monostatic'.
reports = rdr(targetPoses,simTime)reports от целевых положений, targetPoses, в текущем времени симуляции, simTime. Объект может сгенерировать отчеты для нескольких целей. Включить этот синтаксис:
Установите DetectionMode свойство к 'Monostatic'.
Установите InterferenceInputPort свойство к false.
Установите EmissionsInputPort свойство к false.
reports = rdr(targetPoses,interferences,simTime)interferences, в радаре сигнализируют о передаче. Включить этот синтаксис:
Установите DetectionMode свойство к 'Monostatic'.
Установите InterferenceInputPort свойство к true.
Установите EmissionsInputPort свойство к false.
reports = rdr(emissions,emitterConfigs,simTime)emissions, и настройки соответствующих эмиттеров, emitterConfigs, это генерирует эмиссию. Включить этот синтаксис:
Установите DetectionMode свойство к 'Monostatic'.
Установите InterferenceInputPort свойство к false.
Установите EmissionsInputPort свойство к true.
Этот синтаксис применяется, когда вы устанавливаете DetectionMode свойство к 'Bistatic' или 'ESM'. В этих двух режимах, TargetReportFormat может только быть 'Detections' и DetectionCoordinates может только быть 'Sensor spherical'.
Этот синтаксис применяется, когда вы устанавливаете HasINS свойство к true.
[___] = rdr(___, указывает информацию положения радарной платформы через оценку INS. Заметьте, что insPose,simTime)insPose аргумент является вторым к последнему аргументу перед simTime аргумент. Этот синтаксис может использоваться с любым из предыдущих синтаксисов. Дополнительную информацию см. в свойстве HasINS.
Используйте этот синтаксис, если вы хотите вывести дополнительную информацию отчетов.
[ возвращает количество отчетов, reports,numReports,config] = rdr(___)numReports, и настройка радара, config, в текущем времени симуляции.
Чтобы использовать объектную функцию, задайте Систему object™ как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
Создайте три цели путем определения их ID платформы, положения и скорости.
tgt1 = struct('PlatformID',1, ... 'Position',[0 -50e3 -1e3], ... 'Velocity',[0 900*1e3/3600 0]); tgt2 = struct('PlatformID',2, ... 'Position',[20e3 0 -500], ... 'Velocity',[700*1e3/3600 0 0]); tgt3 = struct('PlatformID',3, ... 'Position',[-20e3 0 -500], ... 'Velocity',[300*1e3/3600 0 0]);
Создайте радар наблюдения аэропорта, который составляет 15 метров над землей.
rpm = 12.5; fov = [1.4; 5]; % [azimuth; elevation] scanrate = rpm*360/60; % deg/s updaterate = scanrate/fov(1); % Hz sensor = fusionRadarSensor(1,'Rotator', ... 'UpdateRate',updaterate, ... 'MountingLocation',[0 0 -15], ... 'MaxAzimuthScanRate',scanrate, ... 'FieldOfView',fov, ... 'AzimuthResolution',fov(1));
Сгенерируйте обнаружения от полного скана радара.
simTime = 0;
detBuffer = {};
while true
[dets,numDets,config] = sensor([tgt1 tgt2 tgt3],simTime);
detBuffer = [detBuffer; dets]; %#ok<AGROW>
% Is full scan complete?
if config.IsScanDone
break % yes
end
simTime = simTime + 1/sensor.UpdateRate;
end
radarPosition = [0 0 0];
tgtPositions = [tgt1.Position; tgt2.Position; tgt3.Position];
Визуализируйте результаты.
clrs = lines(3); figure hold on % Plot radar position plot3(radarPosition(1),radarPosition(2),radarPosition(3),'Marker','s', ... 'DisplayName','Radar','MarkerFaceColor',clrs(1,:),'LineStyle','none') % Plot truth plot3(tgtPositions(:,1),tgtPositions(:,2),tgtPositions(:,3),'Marker','^', ... 'DisplayName','Truth','MarkerFaceColor',clrs(2,:),'LineStyle', 'none') % Plot detections if ~isempty(detBuffer) detPos = cellfun(@(d)d.Measurement(1:3),detBuffer, ... 'UniformOutput',false); detPos = cell2mat(detPos')'; plot3(detPos(:,1),detPos(:,2),detPos(:,3),'Marker','o', ... 'DisplayName','Detections','MarkerFaceColor',clrs(3,:),'LineStyle','none') end xlabel('X(m)') ylabel('Y(m)') axis('equal') legend

fusionRadarSensorСоздайте радиолокационное излучение и затем обнаружьте эмиссию с помощью fusionRadarSensor объект.
Во-первых, создайте радиолокационное излучение.
orient = quaternion([180 0 0],'eulerd','zyx','frame'); rfSig = radarEmission('PlatformID',1,'EmitterIndex',1,'EIRP',100, ... 'OriginPosition',[30 0 0],'Orientation',orient);
Затем создайте датчик ESM с помощью fusionRadarSensor.
sensor = fusionRadarSensor(1,'DetectionMode','ESM');
Обнаружьте эмиссию RF.
time = 0; [dets,numDets,config] = sensor(rfSig,time)
dets = 1x1 cell array
{1x1 objectDetection}
numDets = 1
config = struct with fields:
SensorIndex: 1
IsValidTime: 1
IsScanDone: 0
FieldOfView: [1 5]
MeasurementParameters: [1x1 struct]
fusionRadarSensor Системный объект может смоделировать три режима обнаружения: моностатические, бистатические, и электронные меры по поддержке (ESM) как показано на следующих рисунках.
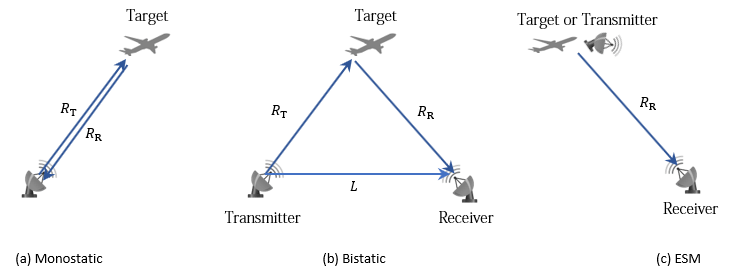
Для моностатического режима обнаружения передатчик и приемник расположены, как показано на рисунке (a). В этом режиме измерение области значений R может быть описан как R = R T = R R, где R T и R R являются расстояниями от передатчика до цели и с цели на приемник, соответственно. В радарном датчике измерением области значений является R = c t/2, где c является скоростью света, и t является общим временем передачи сигнала. Кроме измерения области значений, моностатический датчик может также опционально сообщить об уровне области значений, азимуте и измерениях вертикального изменения цели.
Для бистатического режима обнаружения передатчик и приемник разделяются расстоянием L. Как показано на рисунке (b), сигнал испускается от передатчика, отразился от цели и получил приемником. Бистатическое измерение области значений R b задано как R b = R T + R R − L. В радарном датчике бистатическое измерение области значений получено R b = c Δ t, где Δ t является разницей во времени между приемником, получающим прямой сигнал от передатчика и получающий отраженный сигнал от цели. Кроме бистатического измерения области значений, бистатический датчик может также опционально сообщить о бистатическом уровне области значений, азимуте и измерениях вертикального изменения цели. Поскольку бистатическая область значений и два угла подшипника (азимут и вертикальное изменение) не соответствуют тому же радиус-вектору, их нельзя объединить в радиус-вектор и сообщить в Декартовой системе координат. В результате об измерениях бистатического датчика можно только сообщить в сферической системе координат.
Для режима обнаружения ESM приемник может только получить сигнал, отраженный от цели или непосредственно испускаемый от передатчика, как показано на рисунке (c). Поэтому единственные доступные измерения являются азимутом и вертикальным изменением цели или передатчика. Об этих измерениях можно только сообщить в сферической системе координат.
MeasurementParameters свойство выходного обнаружения состоит из массива структур, который описывает последовательность координатных преобразований от дочерней системы координат до родительской системы координат или обратных преобразований. В большинстве случаев самой длинной необходимой последовательностью преобразований является Датчик → Платформа → Сценарий.
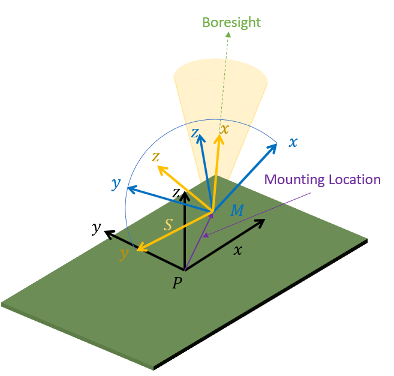
Если об обнаружениях сообщают в сферических координатах датчика и HasINS установлен в false, затем последовательность состоит только из одного преобразования от датчика до платформы. В этом преобразовании, OriginPosition то же самое как MountingLocation свойство датчика. Orientation состоит из двух последовательных вращений. Первое вращение, соответствуя MountingAngles свойство датчика, составляет вращение от системы координат платформы (P) к датчику, монтирующему систему координат (M). Второе вращение, соответствуя азимуту и углам возвышения датчика, составляет вращение от датчика, монтирующего систему координат (M) к датчику, сканируя систему координат (S). В системе координат S x - направление является направлением опорного направления и y - направление находится в x-y плоскость датчика, монтирующего систему координат (M).
Если HasINS true, последовательность преобразований состоит из двух преобразований: сначала из сценария структурируют к системе координат платформы, и затем от системы координат платформы до системы координат сканирования датчика. В первом преобразовании, Orientation вращение от системы координат сценария до системы координат платформы и OriginPosition положение системы координат платформы относительно системы координат сценария.
Если об обнаружениях сообщают в прямоугольных координатах платформы и HasINS установлен в false, преобразование состоит только из идентичности.
Таблица показывает поля MeasurementParameters структура. Не все поля должны присутствовать в структуре. Определенный набор полей и их значений по умолчанию может зависеть от типа датчика.
| Поле | Описание |
Frame | Перечислимый тип, указывающий на систему координат раньше, сообщал об измерениях. Когда об обнаружениях сообщают с помощью системы прямоугольной координаты, |
OriginPosition | Смещение положения источника дочерней системы координат относительно родительской системы координат, представленной как вектор 3 на 1. |
OriginVelocity | Скоростное смещение источника дочерней системы координат относительно родительской системы координат, представленной как вектор 3 на 1. |
Orientation | 3х3 ортонормированная матрица вращения системы координат с действительным знаком. Направление вращения зависит от |
IsParentToChild | Логический скаляр, указывающий, если |
HasElevation | Логический скаляр, указывающий, включено ли вертикальное изменение в измерение. Для измерений, о которых сообщают в прямоугольной системе координат, если |
HasAzimuth | Логический скаляр, указывающий, включен ли азимут в измерение. |
HasRange | Логический скаляр, указывающий, включена ли область значений в измерение. |
HasVelocity | Логический скаляр, указывающий, включают ли обнаружения, о которых сообщают, скоростные измерения. Для измерений, о которых сообщают в прямоугольной системе координат, если |
[1] Doerry, Армин В. "Наземное Искривление и Атмосферные Эффекты Преломления на Радарном Распространении Сигнала". Отчет SAND2012-10690 Сандиа, Национальные лаборатории Сандиа, Альбукерке, NM, январь 2013. https://prod.sandia.gov/techlib-noauth/access-control.cgi/2012/1210690.pdf.
[2] Doerry, Армин В. "Измерение движения для Радара с синтезированной апертурой". Отчет SAND2015-20818 Сандиа, Национальные лаборатории Сандиа, Альбукерке, NM, январь 2015. https://pdfs.semanticscholar.org/f8f8/cd6de8042a7a948d611bcfe3b79c48aa9dfa.pdf.
trackingScenario | trackerGNN | radarEmitter | radarEmission | rcsSignature | radarChannel
