Программное обеспечение HDL Coder™ предоставляет возможности архитектуры, которые расширяют ваше управление скоростью по сравнению с компромиссами области в реализации проектов фильтра. Чтобы достигнуть желаемого компромисса для сгенерированного HDL-кода, можно или задать полностью параллельную архитектуру или выбрать одну из нескольких последовательных архитектур. Сконфигурируйте последовательную архитектуру с помощью параметров SerialPartition и ReuseAccum. Можно также выбрать основанный на системе координат фильтр для увеличенной пропускной способности.
Используйте параметры конвейеризации, чтобы улучшить быстродействие ваших проектов фильтра. Добавьте трубопроводы в логику сумматора вашего использования фильтра AddPipelineRegisters для скалярных входных фильтров и AdderTreePipeline для основанных на системе координат фильтров. Задайте настройки канала связи до и после каждого множителя с MultiplierInputPipeline и MultiplierOutputPipeline. Определите номер настроек канала связи до и после использования фильтра InputPipeline и OutputPipeline. Схемы архитектуры показывают местоположения различных конфигурируемых настроек канала связи.
Эта опция является архитектурой по умолчанию. Полностью параллельная архитектура использует специализированный множитель и сумматор для каждого касания фильтра. Касания выполняются параллельно. Полностью параллельная архитектура оптимальна для скорости. Однако это требует большего количества множителей и сумматоров, чем последовательная архитектура, и поэтому использует больше области чипа. Схемы показывают архитектуры для прямой формы и для транспонированных структур фильтра с полностью параллельными реализациями и местоположения конфигурируемых настроек канала связи.
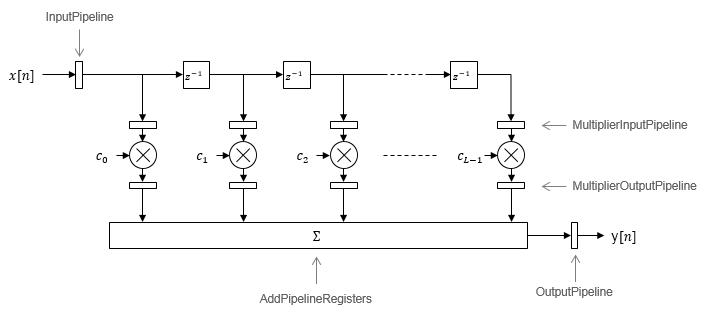
По умолчанию блок реализует линейную логику сумматора. Когда вы включаете AddPipelineRegisters, логика сумматора реализована как конвейерное дерево сумматора. Дерево сумматора использует типы данных полной точности. Если вы генерируете модель валидации, необходимо использовать полную точность в исходной модели, чтобы избежать несоответствий валидации.
![]()
AddPipelineRegisters параметр не оказывает влияния на транспонированную реализацию фильтра.
Последовательные аппаратные ресурсы повторного использования архитектур вовремя, сохраняя область чипа. Сконфигурируйте последовательную архитектуру с помощью параметров SerialPartition и ReuseAccum. Доступные последовательные опции архитектуры полностью последовательны, частично последовательный, и каскадный сериал.
Полностью последовательная архитектура сохраняет область путем многократного использования множителя и ресурсов сумматора последовательно. Например, создание фильтра с четырьмя касаниями использует один множитель и сумматор, выполнение умножения - накапливает операцию однажды для каждого касания. Умножение - накапливается, раздел проекта достигает четыре раза частоты дискретизации ввода/вывода фильтра. Этот проект сохраняет область за счет некоторой потери скорости и более высокого потребления энергии.
В полностью последовательной архитектуре системные часы запускаются на намного более высоком уровне, чем частота дискретизации фильтра. Таким образом, для данного создания фильтра, максимальная скорость, достижимая полностью последовательной архитектурой, меньше максимальной скорости параллельной архитектуры.
Частично последовательные архитектуры покрывают полный спектр скорости по сравнению с компромиссами области, которые находятся между полностью параллельными и полностью последовательными архитектурами.
В частично последовательной архитектуре касания фильтра сгруппированы во многие последовательные разделы. Касания в каждом разделе выполняются последовательно, но разделы выполняются параллельно друг относительно друга. Выходные параметры разделов суммированы в окончательном результате.
Когда вы выбираете частично последовательную архитектуру, вы задаете количество разделов и длины (количество касаний) каждого раздела. Предположим, что вы задаете фильтр с четырьмя касаниями с двумя разделами, каждый имеющий два касания. Системные часы запускаются на уровне дважды частоты дискретизации фильтра.
Каскадно-последовательная архитектура тесно напоминает частично последовательную архитектуру. Как в частично последовательной архитектуре, касания фильтра сгруппированы во многие последовательные разделы, которые выполняются параллельно друг относительно друга. Однако накопленный выход каждого раздела располагается каскадом к аккумулятору предыдущего раздела. Выход всех разделов поэтому вычисляется в аккумуляторе первого раздела. Этот метод называют повторным использованием аккумулятора. Итоговый сумматор не требуется, который сохраняет область.
Каскадно-последовательная архитектура требует, чтобы дополнительный цикл системных часов завершил итоговое суммирование к выходу. Поэтому частота системных часов должна быть увеличена немного относительно часов, используемых в некаскаде частично последовательная архитектура.
Чтобы сгенерировать каскадно-последовательную архитектуру, задайте частично последовательную архитектуру с включенным повторным использованием аккумулятора. Если вы не задаете последовательные разделы, HDL Coder автоматически выбирает оптимальное разделение.
Сериализация фильтра увеличивает общую задержку проекта одним тактом. Последовательные архитектуры используют аккумулятор (сумматор с регистром), чтобы добавить продукты последовательно. Дополнительный итоговый регистр используется, чтобы сохранить суммированный результат всех последовательных разделов, требуя дополнительного такта для операции. Чтобы смоделировать эту задержку, HDL Coder вставляет блок Delay в сгенерированную модель после блока фильтра.
Когда вы выбираете последовательную архитектуру, генератор кода использует полную точность в HDL-коде. HDL Coder поэтому обеспечивает полную точность в сгенерированной модели. Если вы генерируете модель валидации, необходимо использовать полную точность в исходной модели, чтобы избежать несоответствий валидации.
Когда вы выбираете основанную на системе координат архитектуру и обеспечиваете M - демонстрационный входной кадр, кодер реализует полностью параллельную архитектуру фильтра. Фильтр включает подфильтры параллели M для каждой входной выборки.
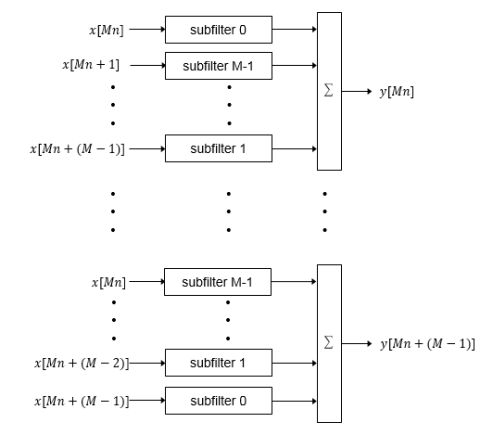
Каждый из подфильтров включает каждый M th коэффициент. Результаты подфильтра добавляются так, чтобы каждая выходная выборка была суммой каждого из коэффициентов, умноженных с одной входной выборкой.
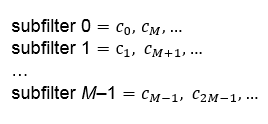
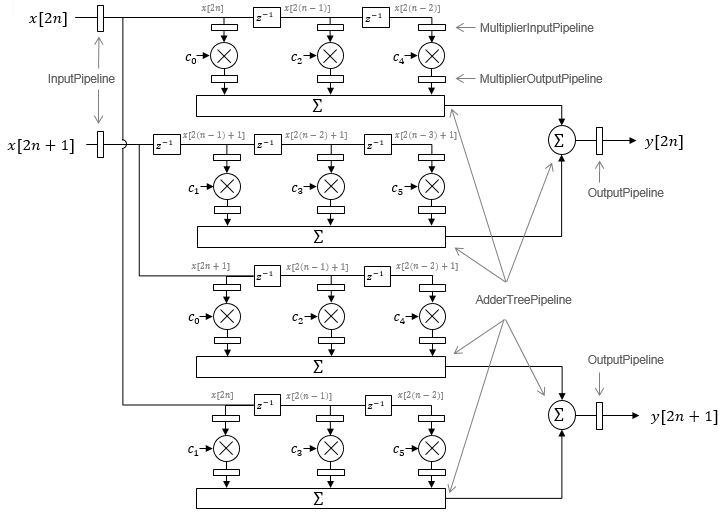
Схема показывает архитектуру фильтра для формата кадра двух выборок (M = 2), и длина фильтра шести коэффициентов. Вход является вектором с двумя значениями, представляющими выборки вовремя. Входные выборки, x[2n] и x[2n+1], представляют n th входная пара. Каждая вторая выборка от каждого потока питается два параллельных подфильтра. Четыре результата подфильтра добавляются вместе, чтобы создать две выходных выборки. Таким образом каждая выходная выборка является суммой каждого из коэффициентов, умноженных с одной из входных выборок.
Суммы реализованы как конвейерное дерево сумматора. Установите AdderTreePipeline задавать количество настроек канала связи между уровнями дерева сумматора. Чтобы улучшить тактовую частоту, рекомендуется, чтобы вы установили этот параметр на 2. Чтобы вместить множители в блоки DSP на вашем FPGA, добавьте настройки канала связи до и после использования множителей MultiplierInputPipeline и MultiplierOutputPipeline.
Для симметричных или антисимметричных коэффициентов архитектура фильтра снова использует содействующие множители и добавляет задержку проекта между множителем и этапами суммирования как требуется.
