Выберите Estimate> State Space Models.
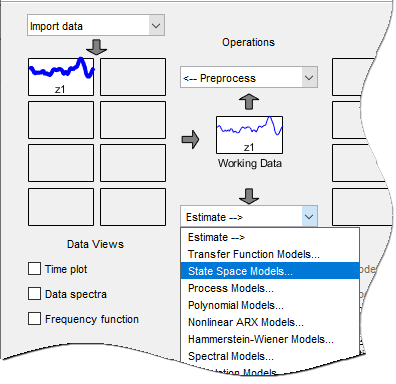
Диалоговое окно State Space Models открывается.
Совет
Для получения дополнительной информации об опциях в диалоговом окне нажмите Help.
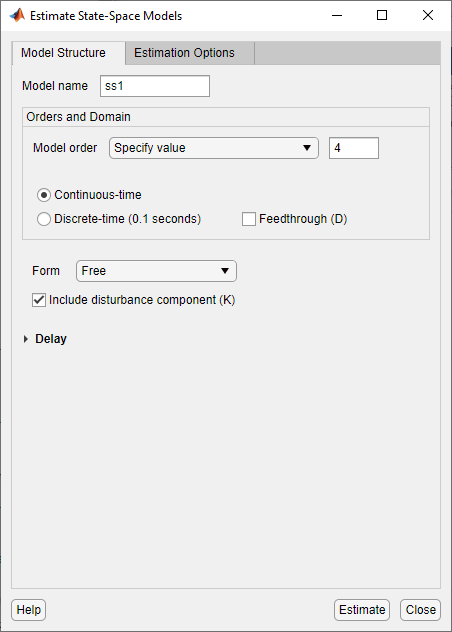
Model name отображает имя модели по умолчанию. Чтобы изменить название, введите новое имя. Имя модели должно быть уникальным в Совете Модели.
Выберите опцию Specify value (если не уже выбранный), и задайте порядок модели в поле редактирования. Порядок модели относится к количеству состояний в модели в пространстве состояний.
Совет
Когда вы не знаете порядка модели, поиска и выбираете порядок. Для получения дополнительной информации см. Оценочную Модель С Выбранным Порядком в Приложении.
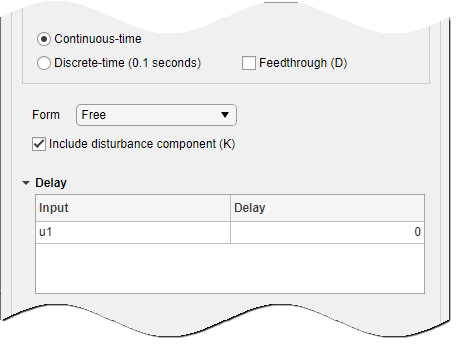
Выберите Continuous-time или опцию Discrete-time, чтобы задать тип модели, чтобы оценить.
Вы не можете оценить модель дискретного времени, если рабочие данные являются данными частотной области непрерывного времени.
Укажите элементы, чтобы включать в структуру модели, включая сквозное соединение (матрица D) и компонент воздействия (матрица K.) Задают форму модели, такую как каноническая форма, путем выбора из опций в Form. Чтобы задать задержки, расширьте раздел Delay.
Для получения дополнительной информации о типе параметризации пространства состояний, смотрите Поддерживаемую Параметризацию Пространства состояний.
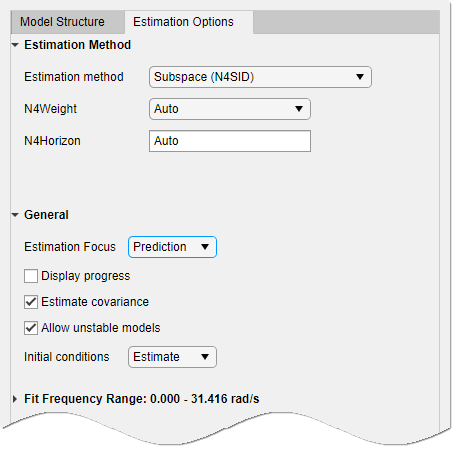
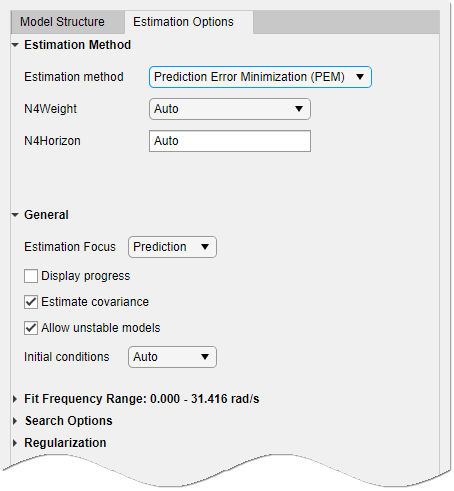
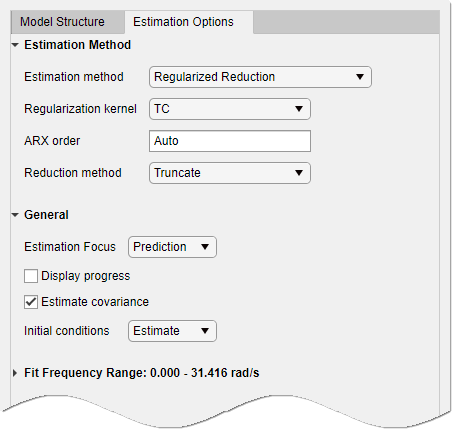
Выберите вкладку Estimation Options, чтобы выбрать метод оценки и сконфигурировать функцию стоимости.
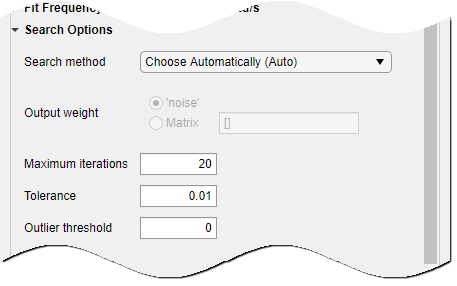
Выберите один из методов в Estimation method и сконфигурируйте опции. Для получения дополнительной информации об этих методах, смотрите Методы оценки Модели в пространстве состояний.
Нажмите Estimate, чтобы оценить модель. Новая модель добавляется к приложению System Identification.
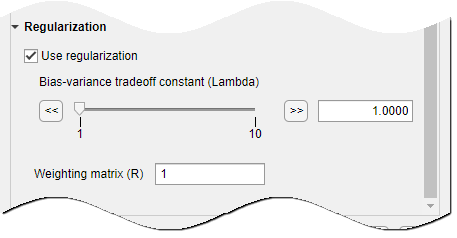
Можно задать и как алгоритм оценки взвешивает подгонку на различных частотах и какой частотный диапазон приложение использует. В приложении, набор Estimation Focus к одной из следующих опций:
Prediction — Использует отношение входного спектра U к инверсии шумовой модели H, чтобы взвесить относительную важность данных через полный частотный диапазон. Это взвешивание соответствует минимизации предсказания "один шаг вперед", который обычно способствует подгонке на кратковременном интервале. Оптимизированный для выходных приложений предсказания.
Simulation — Использует входной спектр только, а не шумовую модель, для взвешивания. Оптимизированный для выходных приложений симуляции.
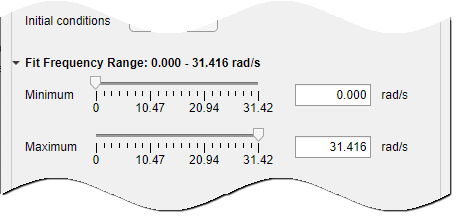
Можно применить полосу пропускания, чтобы ограничить частотный диапазон, по которому алгоритм оценки выполняет подгонку.
Для получения дополнительной информации о взвешивании оценки смотрите раздел Effects Focus и WeightingFilter Опции в функции потерь и метриках качества модели.