Визуализируйте и анализируйте данные о лидаре
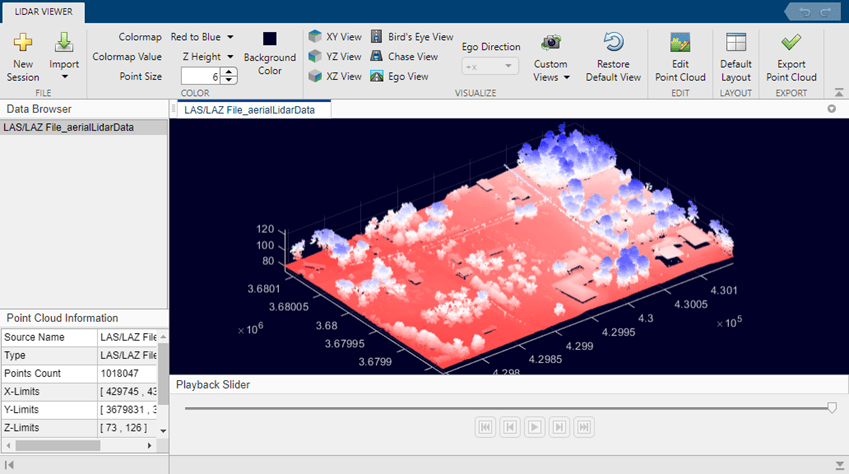
Приложение Lidar Viewer является визуализацией, анализом и инструментом предварительной обработки для данных о лидаре. Приложение обеспечивает эти функции:
Загрузите и визуализируйте данные об облаке точек. Приложение может импортировать pointCloud объекты из рабочей области и считанные данные об облаке точек из PLY, PCAP, LAS, LAZ, PCD и rosbag файлов. Можно экспортировать обработанные облака точек как файлы PLY или PCD.
Просмотрите и анализируйте данные об облаке точек с помощью встроенных полей зрения камеры и карт цветов. Можно также создать и сохранить пользовательские поля зрения камеры.
Используйте встроенные алгоритмы предварительной обработки для наземного удаления, организации, шумоподавления, медианной фильтрации, обрезки и субдискретизации данных об облаке точек лидара.
Импортируйте пользовательские алгоритмы предварительной обработки для данных о лидаре. Можно также создать элемент пользовательского интерфейса, чтобы в интерактивном режиме настроить параметры алгоритма.
Экспортируйте и снова используйте операции предварительной обработки, выполняемые на облаке точек как функциональный скрипт.
MATLAB® Панель инструментов: На вкладке Apps, под Image Processing and Computer Vision, кликают по значку приложения.
Командная строка MATLAB: Войти lidarViewer.
pcshow | pointCloud | pcdownsample | pcmedian | pcdenoise | pcorganize | segmentGroundSMRF | pcfitplane | segmentGroundFromLidarData