Эти инструкции и процедуры применяются к калибровке фотоаппарата лидара. Следуйте этим инструкциям для лучших результатов при использовании рабочего процесса Лидара и Калибровки фотоаппарата.
Используйте checkerboard функция, чтобы создать изображение шахматной доски. Шахматная доска должна быть прямоугольником.
Используйте шахматную доску, которая содержит четное число квадратов вдоль одного ребра и нечетного числа квадратов вдоль другого ребра. Квадратный шаблон может привести к неожиданным результатам для значений внешних параметров камеры. Неквадратный шаблон содержит два черных угла вдоль одной стороны и два белых угла вдоль противоположной стороны. Используйте эти функции, чтобы определить ориентацию шаблона и точку источника шахматной доски. Калибратор присваивает x - направление более длинной стороне.
Распечатайте шахматную доску от от начала до конца на плате пены, чтобы избежать любых погрешностей измерения.
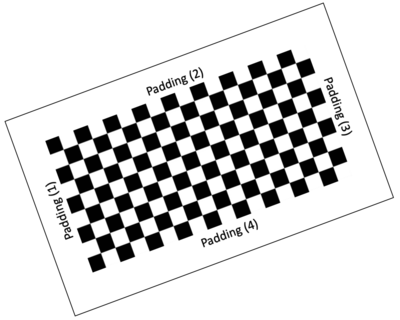
Если вы добавляете дополнение вдоль каждой стороны шахматной доски, измеряете значения точно. Значения должны быть заданы как вектор к приложению Lidar Camera Calibrator или estimateCheckerboardCorners3d функция. Рисунок показывает, как элементы вектора заполняют стороны.
Дополнение шахматной доски
Соберите данные от обоих датчиков одновременно. Соберите данные без эффектов размытости изображения движущегося объекта. Размытость изображения движущегося объекта может ухудшить точность калибровки. Если вы работаете с записью видео, тщательно получаете облака точек, соответствующие тем системам координат.
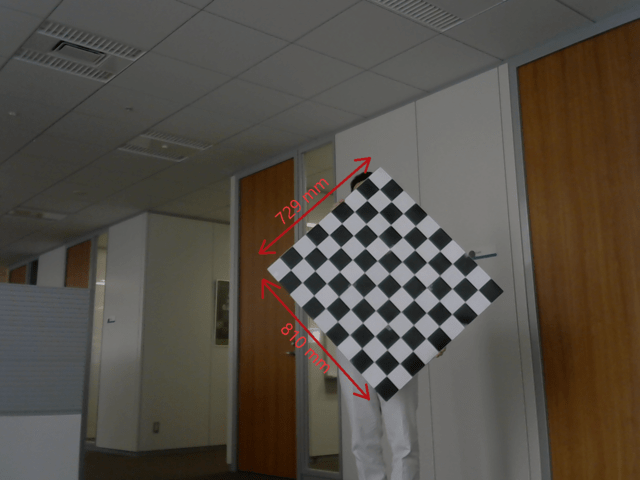
Содержите цель шахматной доски руками, полностью расширенными, а не близко к телу. В противном случае части вашего тела, может казаться, являются плоскими с целью. Это могло привести к неточному обнаружению шахматной доски. Содержите цель сзади, а не на ребрах, для разреженных датчиков лидара. detectRectangularPlanePoints функционируйте ищет плоскости в каждом кластере. Задайте аппроксимированное положение шахматной доски с парой "имя-значение" ROI, чтобы уменьшать ложные обнаружения.
Обратите пристальное внимание на расстояние между датчиком и шахматной доской. Удаленные шахматные доски не могут быть обнаружены точно, когда вы используете с низким разрешением датчики лидара как Velodyne® VLP-16.
Удалите другие элементы на той же плоскости, которую калибратор может кластеризировать с целью.
Рисунок ниже показывает много различных способов содержать шахматную доску для того, чтобы собрать данные. Наклоните шахматную доску, чтобы подвергнуть больше ее области строкам развертки от датчика лидара. Получите по крайней мере 10 систем координат для соответствующей калибровки.
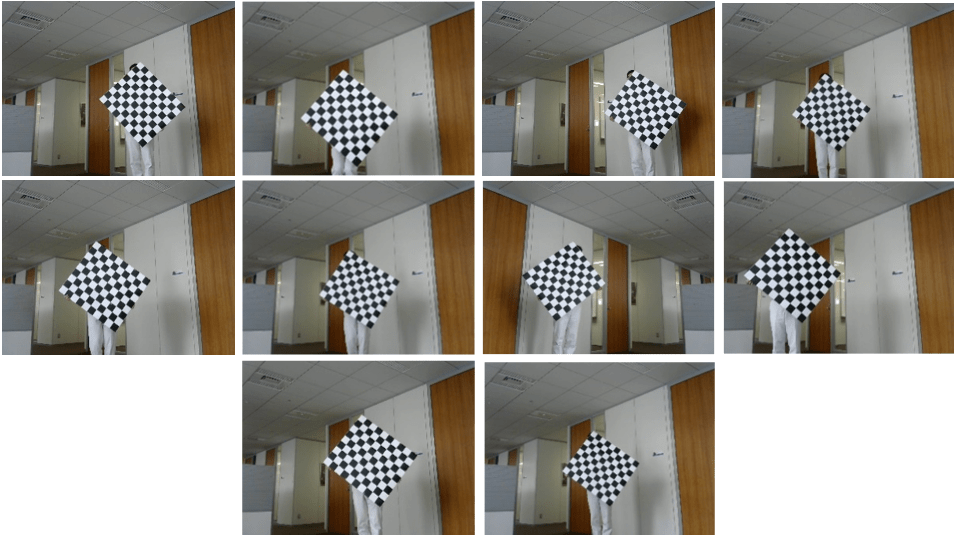
Знайте об угле обзора или поле зрения лидара. Убедитесь, что платы не помещаются в мертвые точки датчика.
Для датчиков лидара с высоким разрешением как HDL-64 и Изгнание OS1-64, можно содержать шахматную доску горизонтально или вертикально при собирании данных. Однако наклоните шахматную доску к 45 углам степени при собирании данных для лучших результатов.
Данные об облаке точек должны быть сохранены в формате PLY или PCD.
Оценка Твердое Преобразование от Лидара до примера Камеры является хорошей начальной точкой для калибровочного рабочего процесса. Можно обратиться к примеру Лидара и Калибровки фотоаппарата для усовершенствованной информации.
Используйте приложение Lidar Camera Calibrator, чтобы в интерактивном режиме выполнить рабочий процесс Лидара и Калибровки фотоаппарата.
Если данные были собраны в rosbag формате, можно использовать Данные о Лидаре и Камере Чтения из примера по Файлу Rosbag, чтобы загрузить калибровочные данные в приложение.
Используйте функции предварительной обработки как pcdenoise и pcdownsample функции, чтобы уменьшать шум в облаках точек.
Lidar Camera Calibrator | estimateCheckerboardCorners3d
