Оцените мировые координаты системы координат угловых точек шахматной доски в изображении
imageCorners3d = estimateCheckerboardCorners3d(I,cameraIntrinsic,checkerSize)I, при помощи параметров внутреннего параметра камеры cameraIntrinsic и размер квадратов шахматной доски checkerSize.
[ дополнительно возвращает размерности шахматной доски imageCorners3d,boardDimensions] = estimateCheckerboardCorners3d(I,cameraIntrinsic,checkerSize)boardDimensions.
[ оценивает мировые координаты системы координат угловых точек шахматной доски от набора файлов изображений, imageCorners3d,boardDimensions,imagesUsed] = estimateCheckerboardCorners3d(imageFileNames,cameraIntrinsic,checkerSize)imageFileNames. Функция возвращает логический вектор, который указывает, в которых изображениях она обнаружила шахматную доску, imagesUsed, в дополнение к выходным аргументам от предыдущих синтаксисов.
[___] = estimateCheckerboardCorners3d( оценивает мировые координаты системы координат угловых точек шахматной доски от массива изображений, imageArray,cameraIntrinsic,checkerSize)imageArray.
[___] = estimateCheckerboardCorners3d(___, задает опции с помощью одного или нескольких аргументов пары "имя-значение" в дополнение к любой комбинации аргументов от предыдущих синтаксисов. Например, Name,Value)'MinCornerMetric',0.2 устанавливает порог для угловой метрики шахматной доски к 0,2.
Обнаружьте шахматную доску в изображении с помощью estimateCheckerboardCorners3d функционируйте и оцените мировые координаты системы координат углов шахматной доски.
Считайте изображение в рабочую область.
Image = imread('CheckerboardImage.png');Загрузите параметры камеры в рабочую область.
intrinsic = load('calibration.mat');Установите размер квадратов шахматной доски в миллиметрах.
squareSize = 200;
Оцените углы шахматной доски.
boardCorners = estimateCheckerboardCorners3d(Image, ...
intrinsic.cameraParams,squareSize)boardCorners = 4×3
1.2840 -0.5216 8.8913
2.8614 0.5774 8.3401
1.8230 2.0470 8.2984
0.2455 0.9480 8.8496
Постройте углы на входном изображении.
imPts = projectLidarPointsOnImage(boardCorners,intrinsic.cameraParams,rigid3d()); J = undistortImage(Image,intrinsic.cameraParams); imshow(J) hold on plot(imPts(:,1),imPts(:,2),'.r','MarkerSize',30) title('Detected Checkerboard Corners') hold off

I — Отобразите для обнаруженияОтобразите для обнаружения в виде H-by-W-by-C массив где:
H Высота изображения в пикселях
W Ширина изображения в пикселях
C Количество цветовых каналов
Типы данных: single | double | int16 | uint8 | uint16
imageFileNames — Имена файла образаИмена файла образа в виде вектора символов или массива ячеек из символьных векторов При определении больше чем одного имени файла, необходимо использовать массив ячеек из символьных векторов.
Типы данных: char | cell
imageArray — Набор изображенийНабор изображений в виде H-by-W-by-C-by-N массив, где:
H Высота самого высокого изображения в массиве
W Ширина самого широкого изображения в массиве
C Количество цветовых каналов
N Количество изображений в массиве
Типы данных: single | double | int16 | uint8 | uint16
cameraIntrinsic — Параметры внутреннего параметра камерыcameraIntrinsics объектПараметры внутреннего параметра камеры в виде cameraIntrinsics объект.
checkerSize — Размер квадрата шахматной доскиРазмер квадрата шахматной доски в виде скаляра в миллиметрах. Это значение задает длину каждой стороны квадрата шахматной доски.
Типы данных: single | double
Задайте дополнительные разделенные запятой пары Name,Value аргументы. Name имя аргумента и Value соответствующее значение. Name должен появиться в кавычках. Вы можете задать несколько аргументов в виде пар имен и значений в любом порядке, например: Name1, Value1, ..., NameN, ValueN.
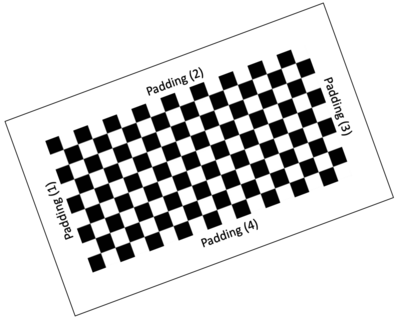
'MinCornerMetric',0.2 устанавливает порог для угловой метрики шахматной доски к 0,2.Padding — Дополнение вдоль каждой стороны шахматной доскиДополнение вдоль каждой стороны шахматной доски в виде разделенной запятой пары, состоящей из 'Padding' и четырехэлементный вектор-строка из неотрицательных значений в миллиметрах.
Рисунок показывает, как элементы вектора заполняют стороны.
Дополнение шахматной доски
Типы данных: single | double
MinCornerMetric — Порог для угловой метрики шахматной доскиПорог для угловой метрики шахматной доски в виде разделенной запятой пары, состоящей из 'MinCornerMetric' и неотрицательный скаляр. Используя более высокое пороговое значение может сократить количество ложных обнаружений в шумном или очень текстурированном изображении.
Типы данных: single | double
ShowProgressBar — Отобразите функциональный прогрессfalse (значение по умолчанию) | true
Отобразите функциональный прогресс индикатора выполнения в виде разделенной запятой пары, состоящей из 'ShowProgressBar' и логический false или true.
Типы данных: логический
Частичное обнаружение шахматной доски не поддерживается.
