Этот раздел посвящен калибровке смещения аналого-цифрового контроллера (ADC) и датчика положения.
В инверторе создание условий сигнала для датчика тока вводит напряжение смещения во входе ADC, чтобы измерить и положительный и отрицательный ток. Это значение смещения отличается для каждого целевого компьютера, потому что это зависит от допусков компонентов в сигнале распознающаяся и обусловливающая схема. Рекомендуется, чтобы вы измерили смещение ADC датчика тока для целевого компьютера. Смещение ADC датчика тока представлено в отсчетах ADC, которые соответствуют нулевому значению тока.
Смотрите Запуск в качестве примера 3-фазовые электродвигатели переменного тока в Регулировании без обратной связи и Калибруйте Смещение ADC, чтобы вручную измерить значение смещения ADC. В примерах Motor Control Blockset™ обновите измеренное значение в inverter.CtSensAOffset и inverter.CtSensBOffset переменные в скрипте инициализации модели. По умолчанию скрипт обновляет inverter.CtSensAOffset и inverter.CtSensBOffset переменные со значениями по умолчанию.
Примеры в Motor Control Blockset вычисляют смещение ADC датчика тока в подсистеме инициализации аппаратного обеспечения. В скрипте инициализации модели, когда вы устанавливаете inverter.ADCOffsetCalibEnable = 1, скрипт включает калибровку смещения датчика тока в целевом компьютере во время инициализации. В подсистеме инициализации аппаратного обеспечения каналы ADC читают вход, текущий многократно, и составляет в среднем их. Токовый контроллер использует это усредненное значение смещения ADC. В скрипте инициализации модели, когда вы устанавливаете inverter.ADCOffsetCalibEnable = 0, скрипт отключает калибровку смещения датчика тока и использует значения из скрипта инициализации.
Примечание
Всегда измеряйте смещение ADC датчика тока, когда двигатель не вращается. Рекомендуется, чтобы вы отключили электрические провода, соединенные с двигателем.
Контроллер требует, чтобы расчет смещения датчика положений определил точную обратную связь в реальном времени положения ротора и реализовал алгоритм Ориентированного на поле управления (FOC) правильно. Рекомендуется, чтобы вы использовали примеры для калибровки смещения, чтобы вычислить смещение положения прежде, чем запустить любой другой пример, который использует FOC.
Смещение датчика Холла является углом между d - ось ротора и положением, обнаруженным датчиком Холла. Можно использовать смещение, чтобы откорректировать и вычислить точное положение d - ось ротора.
Квадратурное смещение датчика энкодера является углом между d - ось ротора и индексом энкодера импульсное положение, обнаруженное квадратурным энкодером.
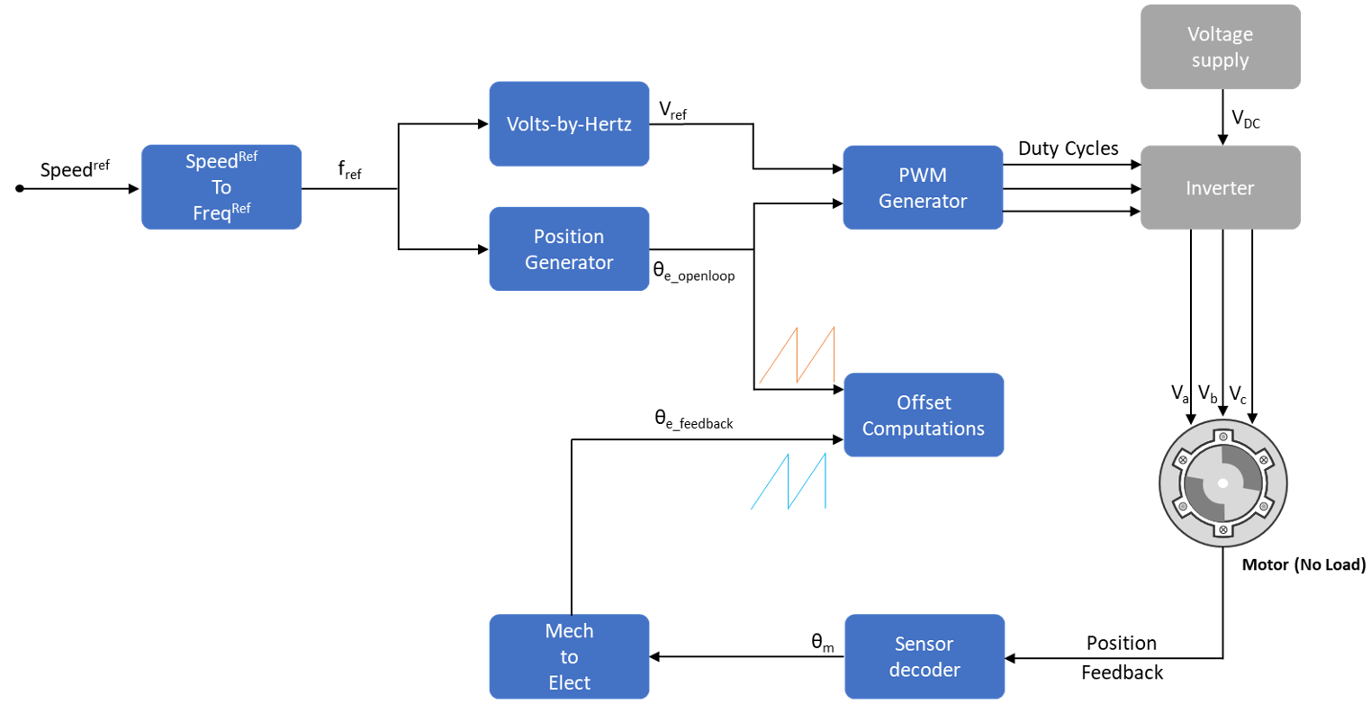
Motor Control Blockset предлагает примеры как Квадратурная Калибровка Смещения Энкодера для Калибровки Смещения Двигателя и Холла PMSM для Двигателя PMSM, чтобы получить точное положение ротора для реализации алгоритма управления. Примеры расчета смещения используют уникальный алгоритм наряду с регулированием без обратной связи, чтобы вычислить смещения положения датчиков положения (Холл или квадратурный энкодер). Регулирование без обратной связи (также известный как скалярное управление или управление Вольтом/Гц) является популярным методом блока управления приводом, который может использоваться, чтобы запустить любой электродвигатель переменного тока. Это - простой метод, для которого не нужна никакая обратная связь от двигателя. Чтобы гарантировать постоянство магнитного потока статора, сохраните амплитуду напряжения питания пропорциональной ее частоте. Этот рисунок показывает обзор регулирования без обратной связи. Дополнительную информацию см. в Разомкнутом контуре и Управлении С обратной связью.
При помощи этого алгоритма калибровочные примеры смещения обнаруживают смещение положения этим способом:
Проверяйте, находится ли двигатель в условии без загрузок.
Запустите и вращайте двигатель в разомкнутом контуре в очень низкой скорости (например, 60 об/мин). В низкой скорости ротор d - ось практически ориентирована на вращающееся магнитное поле статора.
Измерьте положение обратной связи доступного датчика положений (Холл или квадратурный энкодер).
Сравните положение разомкнутого контура с положением обратной связи и проверяйте, что последовательность фазы правильна. При необходимости откорректируйте моторную последовательность фазы.
Вычислите положение датчика Холла, возмещенное путем получения различия между положением разомкнутого контура и положением обратной связи.
Запустите двигатель в разомкнутом контуре для немногих циклов и остановите двигатель. Убедитесь, что импульс индекса энкодера обнаруживается, по крайней мере, однажды. Заблокируйте ротор в d - ось. Квадратурное смещение положения энкодера идентично обратной связи положения. Это выводит квадратурное положение смещения механического устройства энкодера.
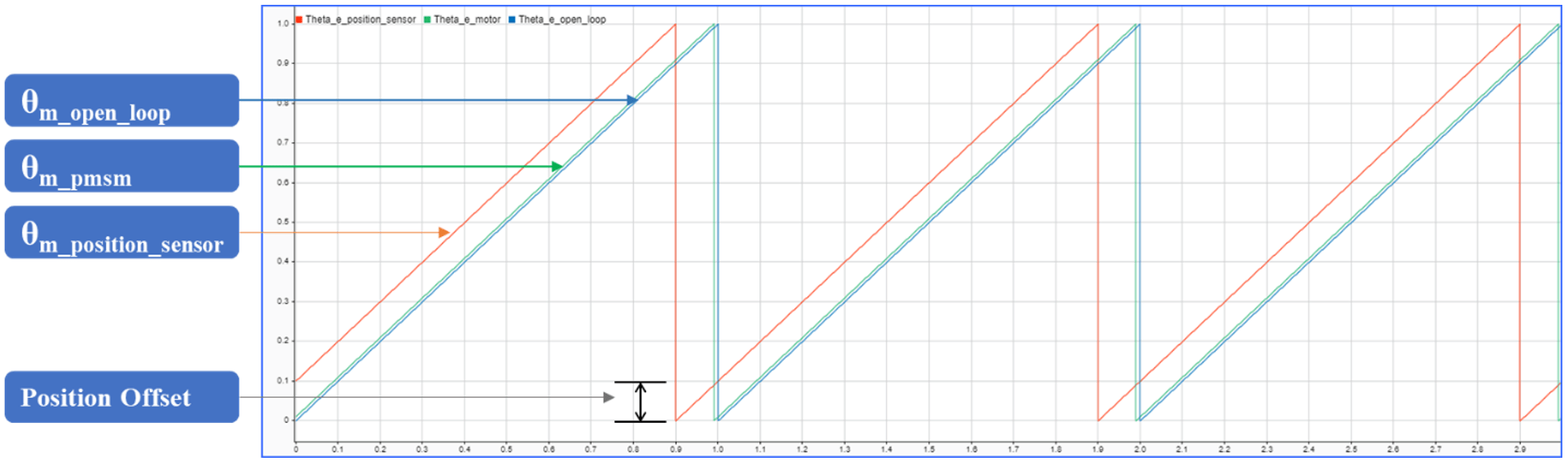
Этот рисунок показывает сравнение положения разомкнутого контура от алгоритма управления наряду с фактическим положением двигателя. Рисунок также показывает обратную связь от датчика положений. Смещение положения, которое является различием между положением разомкнутого контура и положением обратной связи от датчика, вычисляется алгоритмом, предоставленным в калибровочных моделях смещения.
Обновите измеренное смещение в pmsm.PositionOffset переменная в скрипте инициализации модели примеров.
Для оценки параметра обновите измеренное смещение Холла в поле Hall Offset mcb_param_est_host_read модель.
Примечание
Калибровка Смещения Холла для Моторного примера PMSM выводит электрическое смещение положения. Принимая во внимание, что, Квадратурная Калибровка Смещения Энкодера для Моторного примера PMSM выводит механическое смещение положения.
Для шагов, чтобы вычислить смещения, смотрите эти примеры:
Квадратурная калибровка смещения энкодера для двигателя PMSM
