Трехфазный асинхронный двигатель
Powertrain Blockset / Движение / Электродвигатели и Инверторы
Motor Control Blockset / Электрические системы / Двигатели
Блок Induction Motor реализует трехфазный асинхронный двигатель. Блок использует трехфазные входные напряжения, чтобы отрегулировать отдельные токи фазы, позволяя управление крутящего момента двигателя или скорости.
По умолчанию блок устанавливает параметр Simulation Type на Continuous использовать время непрерывной выборки в процессе моделирования. Если вы хотите сгенерировать код для двойных и одинарных точностей фиксированного шага, рассматривая установку параметра на Discrete. Затем задайте параметр Sample Time, Ts.
Блок реализует уравнения, которые описываются в неподвижных относительно ротора (qd) координатах. D-ось выравнивается с осью a. Все количества в системе координат ротора отнесены в статор.
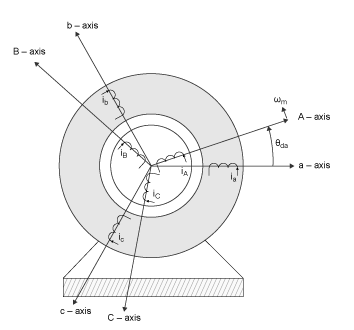
Блок использует эти уравнения, чтобы вычислить электрическую скорость (ωem) и скорость скольжения (ωslip).
Чтобы вычислить dq ротор электрическая скорость относительно A-оси ротора (dA), блок использует различие между статором ось (da) скорость и скоростью скольжения:
Чтобы упростить уравнения для потока, напряжения и текущих преобразований, блок использует стационарную систему координат:
| Вычисление | Уравнение |
|---|---|
| Поток |
|
| Текущий |
|
| Индуктивность |
|
| Электромагнитный крутящий момент |
|
Инвариант степени dq преобразование, чтобы гарантировать, что dq и три степени фазы равны |
|
Уравнения используют эти переменные.
ωm | Скорость вращения ротора (rad/s) |
ωem | Электрическая скорость ротора (rad/s) |
ωslip | Электрическая скорость скольжения ротора (rad/s) |
ωsyn | Синхронная скорость ротора (rad/s) |
ωda | статор dq электрическая скорость относительно ротора ось (rad/s) |
ωdA | статор dq электрическая скорость относительно A-оси ротора (rad/s) |
Θda | статор dq электрический угол относительно ротора ось (рад) |
ΘdA | статор dq электрический угол относительно A-оси ротора (рад) |
Lq, Ld | q-и d-составляющие-индукции (H) |
Ls | Индуктивность статора (H) |
Lr | Индуктивность ротора (H) |
Lm | Намагничивание индуктивности (H) |
Lls | Индуктивность утечки статора (H) |
Llr | Индуктивность утечки ротора (H) |
vsq, vsd | Статор q-и напряжения d-оси (V) |
isq, isd | Статор q-и токи d-оси (A) |
λsq, λsd | Статор q-и поток d-оси (Wb) |
irq, ird | Ротор q-и токи d-оси (A) |
λrq, λrd | Ротор q-и поток d-оси (Wb) |
| va, vb, vc | Фазы a напряжения статора, b, c (V) |
| ia, ib, ic | Текущие фазы a статора, b, c (A) |
Rs | Сопротивление обмоток статора (Ом) |
Rr | Сопротивление обмоток ротора (Ом) |
P | Количество пар полюсов |
Te | Электромагнитный крутящий момент (Nm) |
Моторной скоростью вращения дают:
Уравнения используют эти переменные.
J | Объединенная инерция двигателя и загрузки (kgm^2) |
F | Объединенное вязкое трение двигателя и загрузка (N · m / (rad/s)) |
θm | Моторное механическое угловое положение (рад) |
Tm | Крутящий момент вала двигателя (Nm) |
Te | Электромагнитный крутящий момент (Nm) |
Tf | Вал двигателя статический момент трения (Nm) |
ωm | Угловая механическая скорость двигателя (rad/s) |
Для учета степени блок реализует эти уравнения.
| Сигнал шины | Описание | Переменная | Уравнения | ||
|---|---|---|---|---|---|
|
|
| Механическая энергия | Pmot | |
PwrBus | Электроэнергия | Pbus | |||
|
| PwrElecLoss | Резистивные потери мощности | Pelec | ||
PwrMechLoss | Потеря механической энергии | Pmech | Когда Port Configuration установлен в Когда Port Configuration установлен в | ||
|
| PwrMtrStored | Сохраненная моторная степень | Pstr | ||
Уравнения используют эти переменные.
Rs | Сопротивление статора (Ом) |
Rr | Моторное сопротивление (Ом) |
ia, ib, ic | Фаза a Stator, b, и c ток (A) |
isq, isd | Статор q-и токи d-оси (A) |
van, vbn, vcn | Фаза a Stator, b, и c напряжение (V) |
ωm | Угловая механическая скорость ротора (rad/s) |
F | Объединенный двигатель и загружает вязкое затухание (N · m / (rad/s)) |
Te | Электромагнитный крутящий момент (Nm) |
Tf | Объединенный двигатель и момент трения загрузки (Nm) |
[1] Mohan, Нед. Усовершенствованные электроприводы: анализ, управление и моделирующий Используя Simulink. Миннеаполис, MN: MNPERE, 2001.
