В модели mcb_pmsm_foc_sim в качестве примера, конфигурирование токового контроллера и контроллера скорости является двумя важными задачами. Токовый контроллер, как планируют, будет выполняться после каждого T s (50 µsec для 20 переключающаяся частота kHz), и контроллер скорости выполняется после каждого T s_speed (10*T s). Токовый контроллер читает моторные токи фазы и положение и вычисляет рабочий цикл PWM, чтобы запустить двигатель. Контроллер скорости запускает цикл управления, вычисляет I q ссылка для токового контроллера и контролирует скорость вращения двигателя в с обратной связью.
В целевом компьютере токовый контроллер синхронизируется с прерыванием ADC (для каждого T s), и контроллер скорости инициирован после каждого T s_speed (10*T s).
Этот рисунок показывает последовательность события, триггер прерывания, и время выполнения программного обеспечения для алгоритма управления, запускающегося в целевом компьютере.
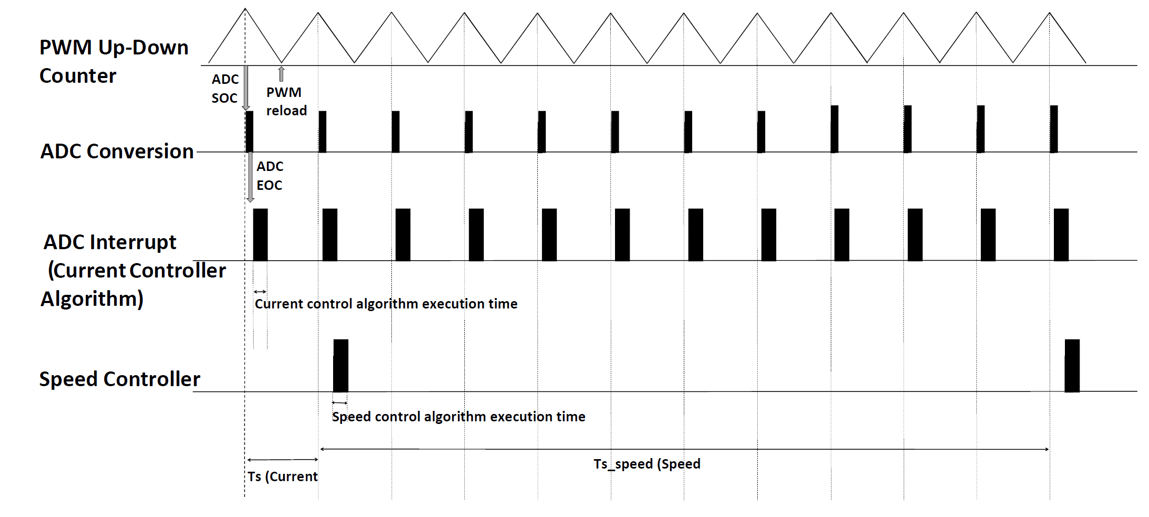
В этом рисунке времена выполнения для токового контроллера и контроллера скорости не по своим масштабам. Смотрите таблицу данных процессора, чтобы лучше изучить функциональность периферийных устройств процессора, таких как ADC (аналого-цифровой конвертер) и PWM (модуляция длительности импульса).
Модель следует за этой последовательностью события:
Периферийное устройство процессора PWM, который выравнивается центром (Реверсивный счетчик), инициировало событие запуска из преобразования (SOC) для модуля ADC, когда значение счетчика PWM равняется периоду PWM.
Модуль ADC преобразует произведенный аналоговый сигнал в цифровые количества и инициировал событие конца преобразования (EOC).
EOC инициировал прерывание ADC.
Токовый контроллер, как планируют, выполнится с прерыванием ADC.
Контроллер скорости, как планируют, будет выполняться после каждого T s_speed.
Можно также использовать SoC Blockset™ для планирования задач, профилирования и обращения к проблемам, связанным с синхронизацией ADC-PWM, ответом контроллера и изучением различных настроек PWM. Для получения дополнительной информации смотрите, Интегрируют Планирование MCU и Периферию в Приложении Блока управления приводом.
