Дорожный профиль с различными свойствами вертикального изменения и трения
Simscape / Автомобильная трансмиссия / Tires & Vehicles

Блок Road Profile представляет дорожный профиль различными свойствами вертикального изменения и трения. Когда транспортное средство перемещается, параметры оси и положение центра тяжести (CG) определяют положение передних и задних осей. Блок использует положения оси, чтобы вычислить угол транспортного средства и, опционально, коэффициенты трения шины. Трение моделей блока с помощью или Волшебной Формулы или кинетических и статических коэффициентов трения.
Используйте вкладку Variables, чтобы установить приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
Horizontal distance from CG to front axle — Расстояние между CG и передней осьюm (значение по умолчанию) | положительная скалярная величинаГоризонтальное расстояние от центра тяжести (CG) к передней оси. Задайте то же значение, как задан для параметра Horizontal distance from CG to front axle связанного блока Vehicle Body.
Horizontal distance from CG to rear axle — Расстояние между CG и задней осьюm (значение по умолчанию) | положительная скалярная величинаГоризонтальное расстояние от центра тяжести (CG) к задней оси. Задайте то же значение, как задан для параметра Horizontal distance from CG to rear axle связанного блока Vehicle Body.
Horizontal distance for vertical profile — Вертикальное горизонтальное расстояние профиляm (значение по умолчанию) | векторПоиск по таблице, соответствующий расстоянию, что CG транспортного средства перемещает относительно системы координат x - ось. Например, рисунок показывает горизонтальный профиль [-10, 0, 10]. Экстраполяция поиска по таблице является самой близкой.
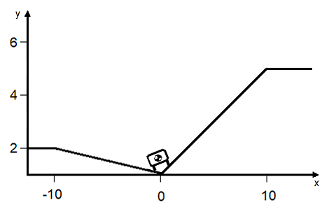
Vertical profile — Вертикальный профильm (значение по умолчанию) | векторПоиск по таблице, соответствующий расстоянию, что CG транспортного средства перемещает относительно системы координат y - ось. Например, рисунок показывает вертикальный профиль [2, 0, 5]. Экстраполяция поиска по таблице является самой близкой.
Friction output — Содействующий выходной тип тренияNone (значение по умолчанию) | Physical signal Magic Formula coefficientsPhysical signal friction coefficientsТип коэффициента трения, что блок выходные параметры. Выберите Physical signal Magic Formula coefficients варьироваться трение для блоков Tire (Magic Formula). Выберите Physical signal friction coefficients варьироваться трение для блоков Tire (Friction Parameterized).
Установка этого параметра на Physical signal Magic Formula coefficients или Physical signal friction coefficients делает порты MF и MR и сопоставила видимые параметры Friction.
Horizontal distance for friction profile — Горизонтальное расстояние для профиля тренияm (значение по умолчанию) | векторГоризонтальное расстояние профиля трения.
Этот параметр отображается только, когда параметр Friction Friction output устанавливается на одно из этих значений:
Physical signal Magic Formula coefficients
Physical signal friction coefficients
Magic Formula coefficients for front axle — Передние коэффициенты Формулы Волшебства осиВолшебные коэффициенты Формулы задали как n-by-4 матрица, где n является числом точек в векторе, заданном параметром Horizontal distance for friction profile.
Этот параметр отображается только, когда параметр Friction Friction output устанавливается на Physical signal Magic Formula coefficients.
Magic Formula coefficients for rear axle — Коэффициенты Формулы Волшебства задней осиВолшебные коэффициенты Формулы задали как n-by-4 матрица, где n является числом точек в векторе, заданном параметром Horizontal distance for friction profile.
Этот параметр отображается только, когда параметр Friction Friction output устанавливается на Physical signal Magic Formula coefficients.
Static and kinetic friction coefficients for front axle — Передние коэффициенты трения осиСтатические и кинетические коэффициенты трения передней оси задали как n-by-2 матрица, где n является числом точек в векторе, заданном параметром Horizontal distance for friction profile.
Этот параметр отображается только, когда параметр Friction Friction output устанавливается на Physical signal friction coefficients.
Static and kinetic friction coefficients for rear axle — Коэффициенты трения задней осиСтатические и кинетические коэффициенты трения задней оси задали как n-by-2 матрица, где n является числом точек в векторе, заданном параметром Horizontal distance for friction profile.
Этот параметр отображается только, когда параметр Friction Friction output устанавливается на Physical signal friction coefficients.
Tire (Friction Parameterized) | Tire-Road Interaction (Magic Formula) | Tire (Magic Formula) | Vehicle Body
