Транспортное средство 2D оси с продольной динамикой и движением и корректируемой массой, геометрией, и перетаскивает свойства
Simscape / Автомобильная трансмиссия / Tires & Vehicles
Блок Vehicle Body представляет кузов 2D оси в продольном движении. Транспортное средство может иметь то же самое или различное количество колес на каждой оси. Например, два колеса на передней оси и одно колесо на задней оси. Колеса транспортного средства приняты идентичные в размере. Транспортное средство может также иметь центр тяжести (CG), который является в или ниже плоскости перемещения.
Блок составляет массу тела, аэродинамическое перетаскивание, дорожную наклонную поверхность и распределение веса между осями из-за ускорения и дорожного профиля. Опционально включайте динамику тангажа и приостановки. Транспортное средство не перемещается вертикально относительно земли.
Блок имеет опцию, чтобы включать внешне заданную массу и внешне заданную инерцию. Масса, инерция и центр тяжести кузова могут варьироваться в течение симуляции в ответ на системные изменения.
Оси транспортного средства параллельны и формируют плоскость. Продольное, x, направление находится в этой плоскости и перпендикуляре к осям. Если транспортное средство перемещается на наклоне наклонной поверхности, β, нормальном, z, направление не параллельно силе тяжести, но всегда перпендикулярно продольной осью плоскости.
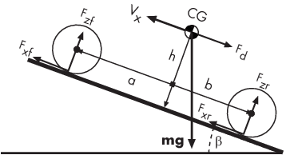
Этот рисунок и таблица define переменные модели движения транспортного средства.
Динамика аппарата и движение
Переменные модели транспортного средства
| Символ | Описание |
|---|---|
| g | Гравитационное ускорение |
| β | Наклоните угол |
| m | Масса транспортного средства |
| h | Высота центра тяжести транспортного средства (CG) над землей |
| a, B | Расстояние передних и задних осей, соответственно, от нормальной точки проекции CG транспортного средства на общую плоскость оси |
| Vx | Скорость транспортного средства. Когда Vx> 0, транспортное средство продвигается. Когда Vx <0, транспортное средство перемещается назад. |
| Vw | Скорость ветра. Когда Vw> 0, ветер является встречным ветром. Когда Vw <0, ветер является попутным ветром. |
| n | Количество колес на каждой оси |
| Fxf, Fxr | Продольные силы на каждом колесе в передней стороне и задней части основывают контактные точки, соответственно |
| Fzf, Fzr | Нормальные силы загрузки на каждом колесе в передней стороне и задней части основывают контактные точки, соответственно |
| A | Эффективная лобная площадь поперечного сечения транспортного средства |
| Cd | Аэродинамический коэффициент сопротивления |
| ρ | Массовая плотность воздуха |
| Fd | Аэродинамическая сила сопротивления |
Движение транспортного средства является результатом результирующего эффекта всех сил и крутящих моментов, действующих на него. Продольные силы шины продвигают транспортное средство или назад. Вес mg транспортного средства действует через его центр тяжести (CG). В зависимости от угла наклонной поверхности вес вытягивает транспортное средство к земле и вытягивает его или назад или вперед. Перемещается ли транспортное средство вперед, или обратное, аэродинамическое перетаскивание замедляет его. Для простоты перетаскивание принято, чтобы действовать через CG.
Обнулите нормальное ускорение и обнулите крутящий момент тангажа, определяют нормальную силу на каждом переднем и заднем колесе.
Колесо нормальные силы удовлетворяет .
Если вы включаете внешне заданную массу или инерцию, уравнения смещены взвешенным значением входа.
Сделайте подачу ускорение зависит от трех компонентов крутящего момента и инерции транспортного средства:
Где:
ɑ является ускорением тангажа.
f является продольной силой.
h является высотой центра тяжести когда измеренная параллель к z - ось.
J является инерцией.
Если вы выбираете линейную модель для жесткости приостановки и затухания, блок использует малое угловое приближение для вычислений тангажа. Если вы выбираете модель поиска по таблице, блок использует векторы, которые вы задаете, вычисляют динамику тангажа. Для уравнений жесткого упора смотрите Translational Hard Stop.
Используйте вкладку Variables, чтобы установить приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
Блок Vehicle Body позволяет вам только продольная динамика модели, параллельная земле и ориентированная вдоль направления движения. Транспортное средство принято, чтобы быть в тангаже и нормальном равновесии. Блок не моделирует тангаж или вертикальное перемещение. По сути, уравнения принимают, что колеса никогда не теряют контакт. Это ограничение может привести к отрицательным нормальным силам.
Tire (Friction Parameterized) | Tire-Road Interaction (Magic Formula) | Tire (Magic Formula) | Tire (Simple) | Translational Hard Stop




