Этот пример показывает занятый механизм, затем расцепленный, пользовательской муфтой. Крутящий момент и движение передаются от одного вала до другого на интервале конечного промежутка времени.
Общая задача в проекте ходовой части передает движение и крутящий момент в различных фиксированных передаточных отношениях. Ходовые части обычно проектируются, чтобы переключиться среди набора отличных передаточных отношений. Реализация переключателя от одного передаточного отношения до другого требует постепенно расцепления одного набора связей автомобильной трансмиссии и привлечения другого набора. Муфты позволяют вам затрагивать и расцеплять валы автомобильной трансмиссии друг от друга постепенно. Блок Disk Friction Clutch представляет стандартную поверхностную основанную на трении муфту, это моделирует это поведение.
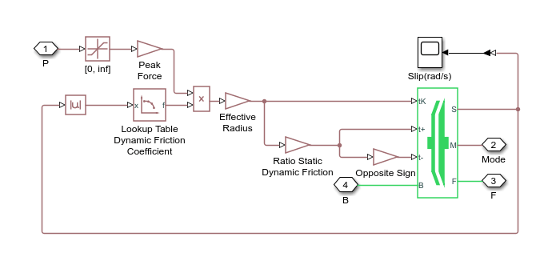
Модель в этом примере использует пользовательскую подсистему муфты, которая содержит блок Fundamental Friction Clutch. Блок Fundamental Friction Clutch требует, чтобы вы задали статическое и кинетическое трение муфты более полностью, чем блок Disk Friction Clutch требует, потому что это моделирует муфты более подробно. См. также Муфты сцепления Модели на Основном Уровне.
Примечание
Можно смоделировать непрерывную передачу крутящего момента движения с блоком Torque Converter, который симулирует вязкость жидкости вместо поверхностного трения и не блокирует.
Откройте модель. В MATLAB® командная строка, войти
sdl_clutch_custom
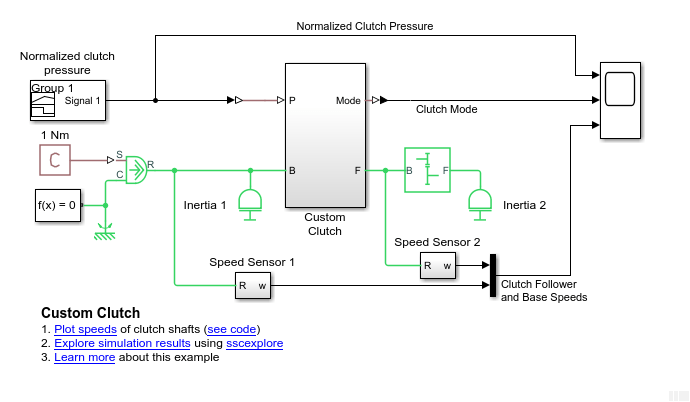
Пользовательская модель муфты с запрограммированным давлением муфты
Пользовательская подсистема муфты
Компоненты модели
Подсистема муфты расположена между Инерцией 1, и Простой Механизм блокирует и сообщает о режиме муфты (вперед, реверс, заблокированный).
Блок PS Constant заменяет синусоидальный сигнал в качестве входа крутящего момента. Блоки датчика крутящего момента не использованы.
Simulink-PS Converter и блоки PS-Simulink Converter связываются между физическими сигналами в среде Simscape™ и Simulink® блокируется, такие как Signal Builder и Осциллограф.
Блок Signal Builder обеспечивает запрограммированный сигнал давления муфты, нормированный между 0 и 1, как показано в следующей таблице. Этот сигнал преобразован в физическое давление в подсистеме муфты.
| Область значений времени (секунды) | Значение сигналов |
|---|---|
| 0–2 | 0 |
| 2–4 | 0–0.8 с постоянным склоном |
| 4–6 | 0.8 |
| 6–7 | 0.8–0 с постоянным склоном |
| 7–10 | 0 |
Откройте Осциллографы и запустите симуляцию. Нормированный сигнал давления муфты следует за профилем, который вы создали в Signal Builder и определяете поведение модели.
От 0 до 2 секунд, скорости Инерции 1 увеличение линейно, потому что это подвергается постоянному крутящему моменту.
В 2 секунды муфта начинает участвовать, и Инерция 2 начинает вращаться. Скорость Инерции 1 продолжает повышаться, несмотря на то, что на более медленном уровне, потому что эти две инерции теперь совместно использует внешний крутящий момент.
В 4 секунды давление достигает своего максимума. Приблизительно в 5,32 секунд, блокировки муфты. Карданные валы, соединенные муфтой теперь, вращаются вместе. Инерция 1 и Инерция 2 продолжают убыстряться на постоянных ускорениях, Инерция 2 при половине скорости Инерции 1.
В 6 секунд муфта начинает расцеплять как перепады давления. Инерция 1 и Инерция 2 продолжают ускоряться с прикладным крутящим моментом.
Муфта разблокировала приблизительно в 6,73 секунд и полностью расцепляет в 7 секунд. (Муфта разблокировала немного перед завершенным расцеплением, потому что давление, даже перед исчезновением, становится слишком маленьким, чтобы обеспечить блокировку.) Инерция 1 все еще ускоряется. Но Инерция 2, теперь свободный от карданного вала и его крутящего момента, больше не ускоряется и вместо этого вращается на постоянном уровне без фрикционной потери.
В то время как эти два вала заблокированы, с 5.32–6.73 секунд, Инерция 1 и Инерция 2 вращения в фиксированном 2:1 отношение, из-за Простого Механизма.
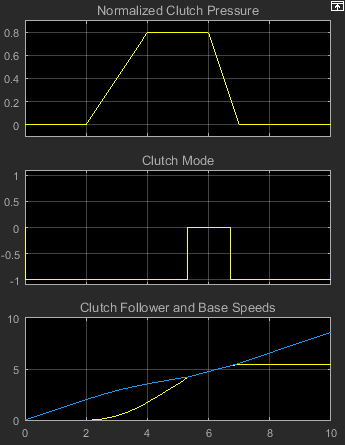
Сигнал режима Clutch указывает на относительное движение своих двух подключенных валов. От 0 до 5,32 секунд, эти два вала перемещаются друг относительно друга. (Управляемый) вал последователя медленнее, чем основа (диск) вал, таким образом, сигнал режима –1. Если эти два вала блокируют, их относительная скорость 0, и переключатели сигнала режима к 0. В 6,73 секунд они разблокировали, и диск (основа), вал начинает ускорять быстрее, чем управляемый (последователь) вал. Сигнал режима переключается назад на –1.
