Системы координат тел обеспечивают точки контакта для соединений и ограничений в вашей модели. Они определяют также относительные ориентации тех соединений и ограничения, и поэтому направления движения, которые допустимы во время моделирования. Чтобы успешно соединить тела через соединения и ограничения, необходимо создать подходящие системы координат связи, и это - задача, которая лучше всего сделана при моделировании самих тел.
Можно добавить системы координат непосредственно в твердые частицы с помощью интерфейса создания системы координат твердых блоков. Этот интерфейс позволяет вам задать положение и ориентацию системы координат в интерактивном режиме, в терминах ключевых функций геометрии, таких как вершины, ребра и поверхности, или в терминах ключевых функций инерции, таких как центр массы и основные оси инерции. Системы координат, которые вы создаете, известны пользовательскими и появляются как порты системы координат на твердом блоке, которому они принадлежат. Рисунок показывает, что блок Brick Solid с двумя пользовательскими портами системы координат пометил F1 и F2.

Можно также создать системы координат с помощью блока Rigid Transform. Этот блок позволяет вам задать положение и ориентацию системы координат численно, в терминах вращения, и перевод преобразовывает. Можно использовать множество параметризации преобразования, включая матрицы вращения и последовательности вращения в случае вращения преобразовывает, и Декартовы и цилиндрические координаты смещения в случае перевода преобразовывают. Рисунок показывает новую систему координат (F) созданное использование блока Rigid Transform из существующей твердой системы координат.
![]()
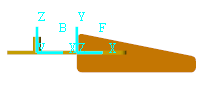
Системы координат, что вы создаете использование блоки Rigid Transform, независимы от любых определенных твердых функций. Можно разместить их куда угодно относительно другой системы координат, пока можно определить преобразование, требуемое получить то размещение. При размещении блока Rigid Transform между двумя портами системы координат можно более точно думать о блоке как средние значения, чтобы возместить системы координат, которые уже существуют. Рисунок показывает смещение, заданное через блок Rigid Transform, помещенный между двумя существующими системами координат.
![]()
Для получения дополнительной информации о системах координат и преобразовывает, смотрите Работу с Системами координат.
В командной строке MATLAB введите sm_cam_flapping_wing. Модель колеблющегося механизма крыла открывается. Посмотрите в маске подсистемы тела под названием RightWing. Обратите внимание на то, что два из твердых блоков, Peg и WingLink, у каждого есть два порта системы координат. Один из портов идентифицирует, что пользовательская система координат создала использование блока Cylindrical Solid. Исследуйте одну из пользовательских систем координат:
Откройте диалоговое окно блока Cylindrical Solid под названием Peg.
В панели инструментов визуализации нажмите кнопку системы координат. Панель визуализации обновляется, чтобы показать ссылочные и пользовательские системы координат тела.
В разделе Properties диалогового окна расширьте узел Frames и нажмите кнопку Edit. Интерфейс создания системы координат открывается текущим определением системы координат:
Система координат была помещена в центр нижней поверхности цилиндра.
Оси системы координат оставили в выравнивании с теми из системы координат локальной ссылки.
Имя системы координат совпадает с меткой соответствующего порта системы координат (B).
Обратите внимание также, что линии связи между некоторыми твердыми блоками содержат блоки Rigid Transform, названные CPXform и WingXForm. Эти блоки задают вращательные и поступательные перемещения между твердыми системами координат, которые они соединяют. Исследуйте преобразования, заданные в одном из блоков:
Откройте инспектор свойств блока Rigid Transform под названием WingXForm. Обратите внимание на то, что вращение преобразовывает, установлен путем выравнивания двух осей системы координат последователя относительно двух осей базовой системы координат.
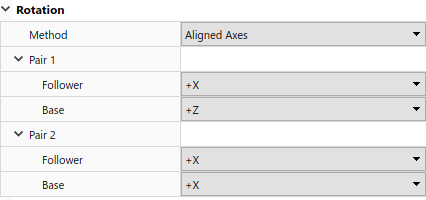
Расширьте параметры Translation. Обратите внимание на то, что поступательное смещение задано вдоль оси (базовой системы координат). Поступательное смещение параметрируется в терминах переменной MATLAB, Ow, чье значение вы задаете в WingLink блок подсистемы.
![]()
Обновите блок-схему. Mechanics Explorer открывается статической визуализацией колеблющейся модели крыла. В области просмотра в виде дерева расширьте RightWing узел и нажимает WingXForm узел, чтобы подсветить системы координат, принадлежащие блоку Rigid Transform.
Необходимо рассмотреть цель системы координат связи — определенного соединения или ограничения — при определении его размещения на теле. Соединения и ограничения часто налагают специальные требования блока к системам координат, чтобы они соединились. Эти требования влияют на соответствующее размещение системы координат связи. Можно найти их на странице с описанием ограничительного блока или соединения.
Если цель является соединением, примите во внимание его степени свободы — типы движения, позволенного между объединенными системами координат связи — и осей системы координат, которым они соответствуют. Например, блок Revolute Joint обеспечивает одну вращательную степень свободы об общем z - ось систем координат связи на телах последователя и основе.
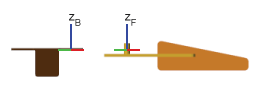
Чтобы соединить два тела через блок Revolute Joint, необходимо затем поместить их объединенные системы координат связи так, чтобы их z - оси каждый выровнялся с желаемой осью вращения на соответствующем теле. Рисунок показывает пример: Housing и RightWing тела sm_cam_flapping_wing модель со связью структурирует правильно расположенный для блока Revolute Joint.
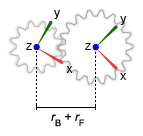
Если цель системы координат связи является ограничением, таким как та характеристика механизмов в mesh, примите во внимание размещения системы координат связи, требуемые для блока. Например, блок Common Gear Constraint требует, чтобы системы координат связи на основе и телах последователя были независимо расстоянием, равным сумме их радиусов тангажа, когда запутывающий тип установлен в External. Это требует также, чтобы z - оси были параллельны, и что x - и y - оси одной быть компланарными с теми из другого.
Требования блока ограничительных блоков задают, как остаток от модели должен содержать системы координат связи, частично через определения тела и частично через другие соединения и ограничения, для ограничения, чтобы применяться без ошибки. Чтобы видеть, как поместить системы координат связи в зубчатые тела для блока через ограничительные блоки механизма, смотрите, Собирают Модель Механизма.
Модели с обратной связью, такие как те из четырёхзвенника и механизмов ползунка заводной рукоятки, ограничиваются в положениях и ориентациях, которые могут взять их составляющие тела. Если размещение системы координат связи представляет соединение или ограничение, несовместимое с кем-либо другим в цикле — то есть, успешно соединяясь каждый требует, чтобы другой пропуск — затем блок перестал работать.
Дело обстоит так в плоском четырехзвенном механизме, например, когда расстояние между системами координат связи на любой ссылке превышает сумму эквивалентных расстояний в остающихся ссылках — или когда ориентации систем координат связи обеспечивают оси вращения соединений во что-либо кроме параллельного выравнивания.
Можно предотвратить много ошибок блока путем тщательного определения систем координат связи на теле с его будущими связями в памяти. Считайте и требования блока характерными для соединения или ограничительного блока и кинематические ограничения наложенный остатком от модели. В общем случае, если вы сталкиваетесь с отказом блока, вы должны:
Идентифицируйте несобранное соединение или ограничение. Используйте Отчет Модели Simscape Multibody (Tools> Model Report в панели меню Mechanics Explorer).
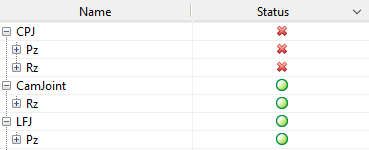
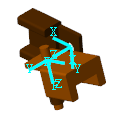
Исследуйте соответствующие системы координат связи. Используйте Mechanics Explorer, чтобы визуализировать эти системы координат. Кликните по имени несобранного соединения или ограничения в области просмотра в виде дерева, чтобы подсветить ее системы координат в панели визуализации. Сравните размещение тех систем координат к требованиям блока соединения или ограничения.
Преобразуйте системы координат связи, чтобы удовлетворить соединению или ограничительным требованиям блока. Можно использовать блок Rigid Transform, чтобы применить необходимое вращение, и перевод преобразовывает. Если система координат связи является пользовательской системой координат, принадлежащей твердому блоку, можно использовать тот блок вместо этого, чтобы отредактировать определение системы координат.
Для примера, показывающего, как разрешить отказ блока, вызванный неправильно помещенной системой координат связи, смотрите Поиск и устранение неисправностей Ошибка блока.
