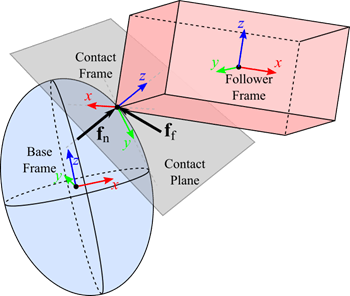
При моделировании твердых блоков в контакте друг с другом силы контакта играют важную роль в том, как твердые блоки ведут себя. Оба нормальная сила, fn, и фрикционная сила, ff, может заставить поведение модели решительно изменяться. Силы контакта играют роль во многих различных ситуациях с моделированием, таких как:
Конвейеры пакета
Автоматизированное перемещение
Динамика гоночного автомобиля
Силы моделей блока Spatial Contact Force между основой и последователем структурируют твердые тела. Когда два твердых блока соединяются, блок Spatial Contact Force прикладывает равные и противоположные силы вдоль общей плоскости контакта. Эти силы соответствуют Третьему Закону Ньютона. Нормальная сила прикладывается на основе глубины проникновения и скорости проникновения. Если применено, фрикционная сила основана на нормальной силе и относительных скоростях при контакте.
Simscape™ Multibody™ использует метод штрафа для моделирования контакта между телами, который позволяет телам проникать небольшое количество. Силы контакта в нормальном направлении вычисляются с помощью закона о силе пружинного демпфера: чем глубже проникновение и большее относительная скорость в направлении проникновения, тем больше нормальные силы контакта.
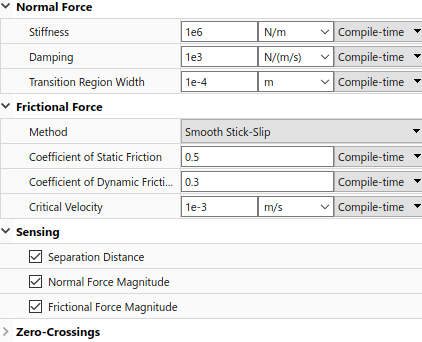
Свойства блока Spatial Contact Force разделены на три расширяемых узла: Normal Force, Frictional Force и Sensing. Установите эти свойства при использовании блока Spatial Contact Force моделировать силы контакта между двумя твердыми телами.
Для получения дополнительной информации об этих свойствах, смотрите Spatial Contact Force.
Параметры в разделе Normal Force используются, чтобы определить нормальную силу, fn, то, что два твердых тела проявляют друг на друге. Можно задать Stiffness, Damping и Transition Region Width.
Параметры в разделе Frictional Force используются, чтобы определить фрикционную силу, ff, то, что два твердых тела проявляют друг на друге. Если вы устанавливаете Method на Smooth Stick-Slip, затем можно задать Coefficient of Static Friction, Coefficient of Dynamic Friction и Critical Velocity. Эти опции не доступны, когда Method установлен в None.
Помимо моделирования контакта между двумя твердыми блоками, можно также использовать блок Spatial Contact Force, чтобы распознаться:
Разделительное Расстояние — расстояние между двумя твердыми телами
Нормальная Сила — нормальная сила, порожденная каждым твердым телом на другой.
Фрикционная Величина Силы — фрикционная сила, порожденная каждым твердым телом на другой.
Чтобы включить эти опции, откройте свойства блока Spatial Contact Force. Под Sensing выберите свойства, которые вы хотите, чтобы блок обнаружил. Для каждого свойства порт осушен на блоке. Соедините эти порты со средством просмотра по вашему выбору.
Блок Spatial Contact Force по сути не знает информации о двух соединяющихся твердых телах. В твердых параметрах блоков включите опцию Export: Entire Geometry.
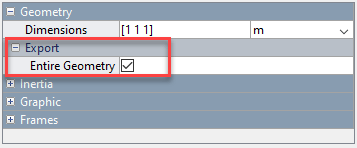
Если этой опции включают новый порт геометрии, G, появляется на вашем твердом блоке.

Соедините порт геометрии с основой или порт последователя на блоке Spatial Contact Force. Выполните те же шаги для своего другого твердого блока и соедините его с остальным портом. Чтобы узнать больше о базе и последующей системе координат, смотрите Выбор Measurement Frame.
По сравнению с моделированием механических отношений в системе мультитела, моделируя контакт представляет больше вариантов, и выбранные методы могут повлиять на скорость симуляции, точность и поддерживаемость модели. Simscape Multibody обеспечивает основные построения моделирования контакта, но существует много способов использовать их.
Вычисленные нормальные силы контакта являются непрерывными функциями скорости проникновения и глубины проникновения. Simscape Multibody вычисляет эти нормальные силы путем сокращения пружины и сил демпфера, когда глубина меньше Transition Region Width. Увеличение Transition Region Width уменьшает резкость силы контакта, делая систему легче для решателя совершенствоваться, но позволяя большие объемы проникновения. Уменьшение Transition Region Width дает силам контакта более резкий профиль, ближе к идеализированному контакту твердого тела. Однако уменьшение Transition Region Width может также ухудшить эффективность решателя.
Установка максимального размера шага к 1e-3 секундам или ниже улучшает точность во многих моделях. Сокращение относительного допуска решателя может произвести подобный эффект. Однако сокращение размера шага также уменьшает скорость симуляции.
Явные решатели, такие как ode45, обычно лучше для систем со многими быстрыми столкновениями или изменениями контакта. Неявные решатели могут бороться при таких обстоятельствах. Если изменения контакта являются нечастыми, и более устойчивые, неявные решатели могут предложить преимущество скорости из-за их способности обработать жесткость, введенную силами контакта.
Разделительное расстояние между двумя твердыми блоками положительно, когда эти два конфигураций не находятся в контакте, нуль, когда они затрагивают, и отрицательные, когда существует нетривиальное проникновение между конфигурациями. Когда разделительное расстояние отрицательно, его величина также известна как глубину проникновения. Глубина проникновения является непрерывной функцией положений и ориентациями конфигураций.
Simscape Multibody использует аналитические алгоритмы геометрии, которые настраиваются для маленьких моделирующих контакт приложений. Некоторые алгоритмы принимают, что глубина проникновения мала по сравнению с размером конфигураций. Если дело обстоит не так, вычисленные (отрицательные) разделительные расстояния могут только быть аппроксимированными, или могут показать разрывы, и получившиеся силы контакта могут быть ошибочными. Для лучших результатов ограничьте глубину проникновения в своей модели.
Spatial Contact Force | Brick Solid | Cylindrical Solid | Spherical Solid
