Simscape™ Multibody™ обеспечивает различные типы обнаружения крутящего момента и силы. Используя блоки соединений, можно обнаружить силы приводов и крутящие моменты ведущие отдельные объединенные примитивы. Можно также обнаружить общее количество и ограничительные силы, действующие на целое соединение.
В этом примере вы используете блок Weld Joint, чтобы обнаружить изменяющиеся во времени внутренние силы, которые скрепляют тело. Модель двойного маятника, smdoc_double_pendulum, обеспечивает начальную точку для примера. Для получения информации о том, как создать эту модель, см. Модель Разомкнутый контур Кинематическая Цепь.
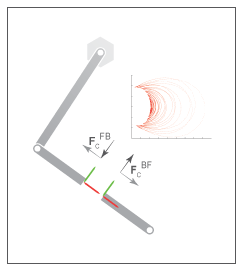
Путем соединения блока Weld Joint между твердыми элементами в бинарной подсистеме ссылки можно обнаружить ограничительные силы, действующие между ними. Следующий рисунок показывает ограничительные силы, что вы распознаетесь в этом примере. Продольная ограничительная сила выравнивается с осью X систем координат сварного шва. Поперечная ограничительная сила выравнивается с осью Y. Ограничительная сила вдоль оси Z незначительна и поэтому проигнорирована.
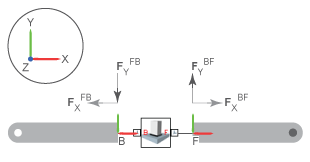
Блок Weld Joint позволяет вам обнаружить ограничительную силу, которую система координат последователя порождает на базовую систему координат или, альтернативно, ограничительная сила, которую базовая система координат порождает на систему координат последователя. У двух сил есть та же величина, но, как показано в бинарной ссылке схематические, противоположные направления. В этом примере вы обнаруживаете ограничительную силу, которую система координат последователя порождает на базовую систему координат.
Можно также выбрать систему координат, чтобы разрешить ограничительное измерение силы в. Система координат разрешения может быть или базовой системой координат или системой координат последователя. Определенные блоки соединений позволяют их системам координат порта иметь различные ориентации, заставляя то же измерение отличаться в зависимости от вашего выбора системы координат разрешения. Однако, потому что блок Weld Joint обеспечивает нулевые степени свободы, обе системы координат разрешения дают к той же ограничительной силе векторные компоненты.
В MATLAB® командная строка, введите smdoc_double_pendulum. Модель двойного маятника открывается.
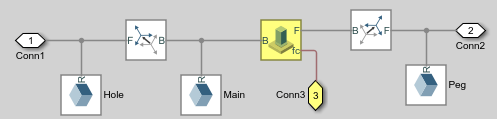
Кликните по стрелке Look Inside Mask в Бинарной Ссылке блок подсистемы A1.
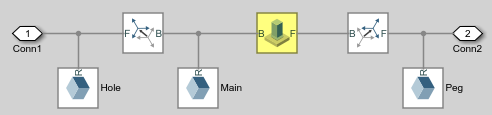
От библиотеки Simscape> Multibody> Joints перетащите блок Weld Joint.
Соедините блок Weld Joint как показано на рисунке. Этот блок позволяет вам обнаружить ограничительные силы, которые скрепляют тело во время движения. Поскольку это обеспечивает нулевые степени свободы между своими системами координат порта, это не оказывает влияния на динамику модели.
В диалоговом окне блока Сварного шва выберите Constraint Force. Блок отсоединяет выходной порт физического сигнала, помеченный ФК.
Добавьте Выходной порт Simscape в блок-схему подсистемы. Соедините блок как показано на рисунке и выйдите из представления подсистемы.
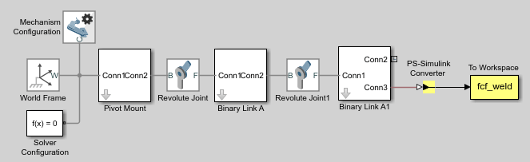
Перетащите следующие блоки в главное окно модели. Эти блоки позволяют вам вывести ограничительный сигнал силы в рабочее пространство MATLAB.
| Библиотека | Блок |
|---|---|
| Simscape> Utilities | PS-Simulink Converter |
| Simulink> Sinks | To Workspace |
Соедините блоки как показано на рисунке. Проверяйте, что блок PS-Simulink Converter соединяется с недавно добавленным портом Simscape.
Задайте эти параметры блоков.
| Блок | Параметр диалогового окна | Значение |
|---|---|---|
| PS-Simulink Converter | Output signal unit | mN |
| К рабочей области | Variable name | fcf_weld |
Модули mN подходят для этой модели, которая содержит примерно 30 см × 2 см × 0,8 см ссылок Алюминия.
В каждом диалоговом окне блока Revolute Joint выберите Internal Mechanics> Damping Coefficient и введите 1e-5. Коэффициент демпфирования позволяет энергетическому рассеянию модели во время движения, так, чтобы модель двойного маятника в конечном счете остановилась.
Во вкладке Modeling нажмите Model Settings.
Во вкладке Solver окна Configuration Parameters, установленного параметр Solver на ode15s. Это - рекомендуемый решатель для физических моделей.
В той же вкладке, установленной параметр Max step size на 0.001 s.
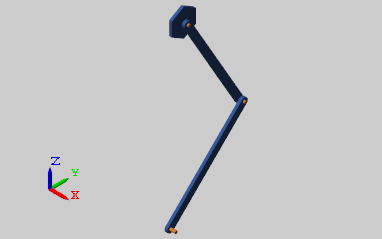
Запустите симуляцию. Mechanics Explorer открывается динамическим представлением модели. В панели меню Mechanics Explorer нажмите кнопку Isometric View, чтобы просмотреть двойной маятник с изометрической точки зрения.
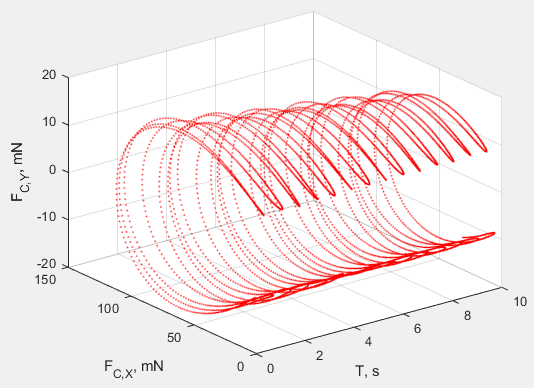
В командной строке MATLAB введите следующие команды plot:
figure;
plot3(fcf_weld.time, fcf_weld.data(:,1), fcf_weld.data(:,2),...
'.', 'MarkerSize', 1, 'Color', 'r');
grid on;
xlabel('T, s');
ylabel('F_{C,X}, mN');
zlabel('F_{C,Y}, mN');