Типовой двигатель и привод с управлением крутящим моментом с обратной связью
Simscape / Электрический / Электромеханический / Моделирование Уровня системы
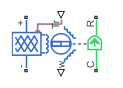
Блок Motor & Drive (System Level) представляет типовой двигатель и диск с управлением крутящим моментом с обратной связью. Используйте этот блок, чтобы смоделировать бесщеточный двигатель (такой как PMSM) и диск, или, в более общем плане, тяга и системы приведения в действие реализовали использование широкого спектра моторных типов.
Чтобы включить быструю симуляцию в уровне системы, этот блок абстрагирует двигатель, электронику диска и управление.
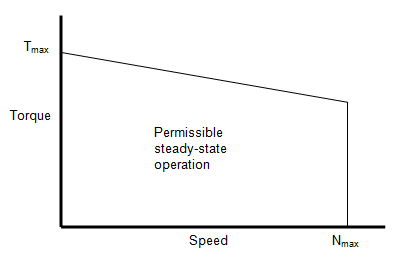
Блок разрешает только область значений крутящих моментов и скоростей, которые задает конверт скорости крутящего момента. В настройке блока по умолчанию вы задаете эти данные в диалоговом окне блока в виде набора точек данных скорости и соответствующих максимальных значений крутящего момента.
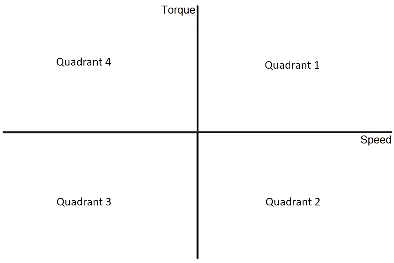
Этот рисунок показывает Декартово определение квадрантов:
Следующий рисунок показывает типичный конверт скорости крутящего момента для управляемого крутящим моментом двигателя и диска.
Задайте конверт скорости крутящего момента для положительной области крутящего момента только, то есть, квадранты 1 и 4. Если вы задаете только для положительных скоростей (квадрант 1 или, эквивалентно, автомобильная область), то квадрант 4 конверта крутящего момента задан блоком как зеркальное отображение квадранта 1. Конверт скорости крутящего момента двигателя имеет тот же профиль, когда двигатель действует в обратном направлении (квадранты 2 и 3).
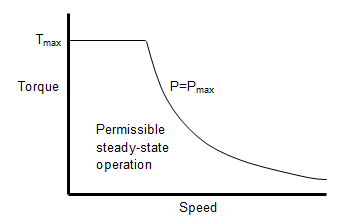
Вместо того, чтобы обеспечить сведенные в таблицу данные скорости крутящего момента, можно задать максимальный крутящий момент и максимальную мощность. Это приводит к профилю конверта скорости крутящего момента, показанному ниже. Другие три операционных квадранта ограничиваются этим тем же профилем.
Блок производит положительный крутящий момент, действующий из механического устройства C к портам R.
Чтобы сверхзакрутить двигатель в течение коротких промежутков времени, установите параметр Allow intermittent over-torque на Yes. В этом случае необходимо задать значения и для Continuous operation maximum torque envelope и для параметров Intermittent operation maximum torque envelope. Внутренне блок определяет, какой конверт крутящего момента применяться на основе крутящего момента требуют историю. Можно сверхзакрутить электропривод, если спрос на крутящий момент был меньше непрерывного конверта крутящего момента операции для больше, чем значение, заданное в параметре Recovery time. Сверхзакручивание отключено, если сверхзакручивание использовали дольше, чем значение, заданное в параметре Over-torque time limit.
Для большего количества специализированного управления сверхзакручиванием отключите сверхзакручивание в блоке Motor & Drive и внешне реализуйте ограничение крутящего момента в Simulink™ между спросом на крутящий момент и входным портом ссылки крутящего момента, Tr, блока Motor & Drive.
Блок позволяет и упрощенное и сведенное в таблицу определение электрических потерь. Значение по умолчанию, упрощенное, поведение должно смоделировать потери как сумму следующих четырех терминов:
Серийное сопротивление между предоставлением мощности постоянного тока и электроприводом.
Постоянные составляющие потерь, независимые от крутящего момента и скорости, P0. Используйте это с учетом фиксированных потерь конвертера.
Зависимая крутящим моментом электрическая потеря k τ2, где τ является крутящим моментом, и k является константой. Это представляет омические потери в медных обмотках.
Зависимая скоростью электрическая потеря kw ω2, где ω является скоростью, и kw является константой. Это представляет потери в железе из-за токов Фуко.
Это упрощение зависимости потерь от крутящего момента и скорости может быть достаточным для ранней дизайнерской работы, независимо от базового моторного типа и управлять топологией.
Если вы требуете большей точности, или позже в процессе проектирования, можно ввести сведенные в таблицу значения потерь в зависимости от частоты вращения двигателя и крутящего момента нагрузки. При использовании этой опции обеспечьте данные для всех операционных квадрантов, в которых запустится ваша симуляция. Если вы обеспечиваете частичные данные (например, только для квадранта 1 прямая автомобильная область), то другие квадранты приняты, чтобы повторить тот же шаблон потерь. Это обычно будет правильно для противоположной автомобильной области, но может быть приближением для тормозящих/генерирующих квадрантов. Блок не делает никакой экстраполяции значений потерь для скорости и закручивает величины, которые превышают область значений таблицы.
Наконец, можно задать электрические потери при помощи сведенных в таблицу данных о КПД вместо одного измерения КПД или сведенных в таблицу данных потерь. При использовании этой опции также обеспечьте данные для всех операционных квадрантов, в которых запустится ваша симуляция. Если вы обеспечиваете частичные данные (например, только для квадранта 1 прямая автомобильная область), то другие квадранты приняты, чтобы повторить тот же шаблон потерь.
Лучшая практика должна обеспечить сведенные в таблицу данные потерь в зависимости от скорости и крутящего момента, а не сведенные в таблицу данные о КПД, потому что:
КПД становится неточно указанным для нулевой скорости или нулевого крутящего момента.
Используя потери, можно также объяснить постоянные составляющие потерь, которые все еще присутствуют для нулевой скорости или крутящего момента.
Если вы используете сведенную в таблицу опцию КПД:
Блок преобразует значения КПД, которые вы вводите в потери, и использует сведенные в таблицу потери для симуляции.
Значения КПД вы предусматриваете нулевую скорость или обнуляете крутящий момент, проигнорированы, и потери приняты нуль, когда или крутящий момент или скорость являются нулем.
Блок использует линейную интерполяцию, чтобы определить потери. Введите таблицу данных для низких скоростей и низких крутящих моментов, как требуется, чтобы получить желаемый уровень точности для более низких условий степени.
Блок не делает никакой экстраполяции значений потерь для скорости и закручивает величины, которые превышают область значений таблицы.
Когда вы обеспечиваете сведенные в таблицу данные о потере или КПД, можно также задать его в зависимости от скорости, крутящего момента нагрузки и напряжения питания DC. Эта опция полезна, когда напряжение питания не отрегулировано и может варьироваться во время симуляции. Одним примером является ходовая часть электромобиля, которая не имеет регулятора DC-DC в восходящем направлении электропривода. Используйте блок Motor & Drive (System Level), чтобы смоделировать электропривод и ввести сведенные в таблицу значения потери или КПД в зависимости от частоты вращения двигателя, крутящего момента нагрузки и напряжения питания DC.
Блок обеспечивает два варианта моделирования, доступные путем щелчка правой кнопкой по блоку по блок-схеме и затем выбирания подходящей опции из контекстного меню, под Simscape> Block choices:
No thermal port — Базовая модель, которая не симулирует термальные эффекты. Это значение по умолчанию.
Show thermal port — Модель с осушенным тепловым портом.
Блок имеет дополнительный тепловой порт, скрытый по умолчанию. Чтобы осушить тепловой порт, выберите один из вариантов блока что термальные эффекты модели, как описано в Вариантах Блока. Это действие отображает тепловой порт H на значке блока и отсоединяет параметры Thermal Port и Temperature Dependence. Эти параметры описаны далее на этой странице с описанием.
Используйте тепловой порт, чтобы симулировать эффекты медных потерь сопротивления, которые преобразовывают электроэнергию в теплоту. Для получения дополнительной информации об использовании тепловых портов в блоках привода смотрите Термальные эффекты Симуляции во Вращательных и Поступательных Приводах.
Можно использовать входной порт физического сигнала F, чтобы симулировать отказ сервопривода, а также соединение и разъединение предоставления DC. Вы не можете симулировать разъединение предоставления DC путем простого открытия переключателя, потому что должно быть конечное напряжение на терминалах сервопривода, произведя ток, который балансирует электроэнергию и механическую энергию.
Если сигнал соединяется с портом F, то блок работает согласно установкам параметров с вкладкой Faults. Например, если Fault condition является Faulted if F >= Fault threshold, затем, когда сигнал в порте F повышается выше значения Fault threshold, сервопривод прекращает действовать, нулевой ток взят из стороны предоставления, и нулевой ток предоставляется стороне загрузки.
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
Моторный драйвер отслеживает спрос на крутящий момент с постоянной времени Tc.
Колебания частоты вращения двигателя из-за механической загрузки не влияют на отслеживание крутящего момента двигателя.
Электрические соединения должны всегда соединяться с предоставлением, таким как источник напряжения постоянного тока или батарея, которая обеспечивает положительное напряжение и способна к поставке или поглощению необходимой степени. Чтобы симулировать включение и выключение источника предоставления, смотрите Отказы Симуляции.
DC Motor | Induction Machine (Single-Phase) | Shunt Motor | Universal Motor



