Вычислите движение транспортного средства с помощью кинематической модели диска дифференциала
Robotics System Toolbox / Мобильные Алгоритмы Робота
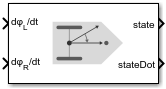
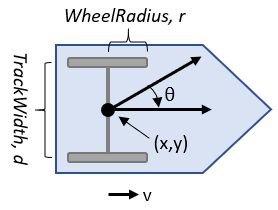
Блок Differential Drive Kinematic Model создает модель транспортного средства дифференциального диска, чтобы симулировать упрощенную динамику аппарата. Эта модель аппроксимирует транспортное средство одной фиксированной осью и колесами, разделенными заданной шириной дорожки Track width. Каждое из колес может управляться независимо с помощью входных параметров скорости, dϕL/dt и dϕR/dt, для левых и правых колес соответственно. Скорость транспортного средства и заголовок заданы от центра оси.
[1] Линчуйте, Кевин М. и Франк К. Парк. Современная Робототехника: Механика, Планирование и Управление 1-й редактор Кембридж, MA: Издательство Кембриджского университета, 2017.

